К. Г. Тихоцкий.
Гидролокатор
Гидролока'тор (от гидро... и лат. loco — помещаю), гидролокационная станция, гидроакустическая станция (прибор) для определения положения подводных объектов при помощи звуковых сигналов. Кроме расстояния до погруженного в воду объекта, некоторые Г. определяют также его глубину погружения по наклонной дальности и углу направления на объект в вертикальной плоскости. О методах определения Г. местоположения объекта и о применении Г. см. в ст. Гидролокация.
Работа Г. (рис.) происходит следующим образом. Импульс электрического напряжения, выработанный генератором, через переключатель «приём — передача» подаётся к электроакустическим преобразователям (вибраторам), излучающим в воду акустический импульс длительностью 10—100 мсек в определенном телесном угле или во всех направлениях. По окончании излучения вибраторы подключаются к гетеродинному усилителю для приёма и усиления отражённых от объектов импульсных акустических сигналов. Затем сигналы поступают на индикаторные приборы: рекордер, электродинамический громкоговоритель, телефоны, электроннолучевую трубку (ЭЛТ). На рекордере измеряется и регистрируется электрохимическим способом на ленте расстояние (дистанция) до объекта; с помощью телефонов и электродинамического громкоговорителя принятые сигналы прослушиваются на звуковой частоте и классифицируются, по максимуму звучания определяется пеленг; на ЭЛТ высвечивается сигнал от объекта и измеряется дистанция до него и направление (пеленг). Длительность паузы между соседними посылками импульсов составляет несколько сек.
По способу поиска объекта различают Г. шагового поиска, секторного поиска и кругового обзора. При шаговом поиске и пеленговании по максимуму сигнала акустическую систему поворачивают в горизонтальной плоскости на угол 2,5—15°, делают выдержку (паузу), равную времени прохождения импульсом пути от Г. до объекта, находящегося на максимально возможной дальности, и от объекта до Г., а затем производят следующий поворот. При пеленговании фазовым методом акустическую систему выполняют в виде двух раздельных систем, переключаемых бесконтактным коммутационного устройством из режима излучения в режим приёма и обратно. Суммарные и разностные сигналы, снятые с двухканального компенсатора, после усиления и сдвига по фазе подводятся к ЭЛТ и рекордеру, где отсчитывается дистанция. Этот способ характеризуется сравнительно высокой точностью пеленгования, большим (несколько мин) временем обследования водного пространства и возможностью слежения лишь за одним объектом. При секторном поиске акустическая энергия излучается одновременно в определенном секторе, а приём и пеленгование отражённых сигналов производятся при быстром сканировании характеристики направленности в пределах этого сектора. При наиболее распространённом круговом обзоре осуществляют ненаправленное (круговое) излучение и направленный (в пределах узкой вращающейся диаграммы направленности) приём, что обеспечивает обнаружение и пеленгование всех окружающих Г. объектов. Акустическая система (антенна) такого Г. выполняется в виде цилиндра или сферы, состоящих из большого количества отдельных вибраторов, и размещается в подъёмно-опускном устройстве или в стационарном обтекателе. К преимуществам этого способа относятся быстрое обследование всего горизонта, возможность обнаруживать и следить за несколькими объектами.
Большинство Г. работает в звуковом и ультразвуковом диапазонах частот (4—40 кгц). Это обусловлено необходимостью получения острой направленности антенны (при относительно небольших её размерах) и достижения заданной разрешающей способности. Г. различного назначения обладают дальностью действия от сотен метров до десятков километров и обеспечивают точность пеленгования около 1°. Для уменьшения неблагоприятного влияния гидрологических факторов (см. Гидроакустика) на дальность действия применяют Г. с акустической системой, помещенной в контейнер, буксируемый кораблём на глубине несколько десятков м (Г. с переменной глубиной погружения).
С. А. Барченков.
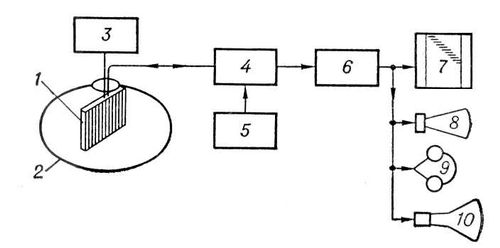
Блок-схема гидролокатора: 1 — акустическая система; 2 — обтекатель; 3 — поворотное устройство; 4 — коммутационное устройство; 5 — импульсный генератор; 6 — усилитель; 7 — рекордер; 8 — электродинамический громкоговоритель; 9 — телефоны; 10 — отметчик (электроннолучевая трубка).
Гидролокация
Гидролока'ция (от гидро... и лат. locatio — размещение), определение положения подводных объектов при помощи звуковых сигналов, излучаемых самими объектами (пассивная локация) или возникающих в результате отражения от подводных объектов искусственно создаваемых звуковых сигналов (активная локация). Под термином «Г.» понимают исключительно звуковую локацию, поскольку звуковые волны являются единственным известным в настоящее время видом волн, распространяющихся в морской среде без значительного ослабления. Г. имеет большое значение в навигации для обнаружения невидимых подводных препятствий, при рыбной ловле для обнаружения косяков и отдельных крупных рыб, в океанологии как инструмент исследования физических свойств океана, картографирования морского дна, поиска затонувших судов и т.п., а также в военных целях для обнаружения подводных лодок, надводных кораблей и др. и наблюдения за ними, для определения координат целей при применении торпедного и ракетного оружия.
При пассивной локации (шумопеленгации) с помощью шумопеленгатора определяют направление на источник звука (пеленг источника), пользуясь звуковым полем, создаваемым самим источником. При этом применяют различные методы: поворачивают приёмную акустическую антенну с острой направленностью до положения, в котором принятый сигнал имеет максимальную интенсивность (т. н. максимальный метод пеленгования); измеряют разность фаз между сигналами на выходе двух разнесённых в пространстве антенн (фазовый метод); определяют относительную разницу во времени приёма сигналов двумя разнесёнными антеннами посредством измерения взаимной корреляции (корреляционный метод), а также путём комбинации этих методов. При пассивной локации расстояние до объекта определяют по двум или нескольким пеленгам, полученным несколькими приёмными системами, разнесёнными на расстояния, сравнимые с расстоянием до лоцируемого объекта (метод триангуляции); так определяется не только положение шумящего объекта, но и траектория его движения. Системы пассивной Г. применяются главным образом для гидроакустического оснащения подводных лодок и надводных кораблей. Пассивной Г. пользуются также при обнаружении подводных шумящих объектов с помощью распределённых береговых и донных систем звукоприёмников, данные от которых по подводному кабелю передаются на береговые системы обработки, а также с помощью системы гидроакустических радиобуев, информация от которых принимается по радиоканалу специальными самолётами, курсирующими в районе плавания буев. Кроме того, пассивное определение направления на шумящий объект является основой действия акустических самонаводящихся торпед.
Если источник звука излучает короткий звуковой импульс, то положение источника можно определить по разностям времён прихода импульсов, принятых ненаправленными приёмниками в трёх или более разнесённых по пространству пунктах. Таким способом локализации источников пользуются в береговой системе дальнего обнаружения судов, терпящих бедствие в открытом океане (система СО ФАР); источником звука при этом служит взрыв заряда, погружаемого на определенную глубину.
Системы активной Г. основаны на явлении звукового эхо (рис.) и различаются методами временной модуляции посылаемого сигнала и способами обзора пространства. Для определения дальности объекта чаще всего пользуются импульсной, частотной и шумовой модуляциями сигнала. При импульсной модуляции расстояние R до цели находится по времени запаздывания t отражённого импульса: R=ct/2, где с — скорость распространения звука в среде. При частотной модуляции частота f излучаемого сигнала меняется со временем t по линейному закону f (t)=f+gt, где f и g — постоянные начальная частота и скорость изменения частоты. Поэтому отражённый сигнал, принятый приёмником, будет отличаться по частоте от сигнала, излучаемого в данный момент, т.к. принятый сигнал представляет собой задержанную на время t копию посланного сигнала, а частота излучаемого сигнала за время t изменилась согласно приведённой формуле. Для неподвижной цели разность частот будет постоянной и равной f_ = gt. Выделив разностную частоту, определяют расстояние до цели R по формуле R=cf_/2g. Аналогична схема действия гидролокатора с шумовым излучением и корреляционной обработкой сигнала.