А. Ю. Ишлинский, С. С. Ривкин.
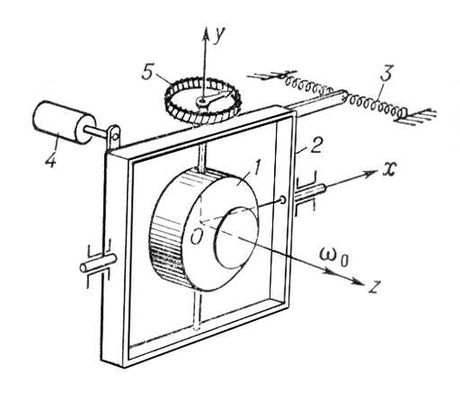
Принципиальная схема гироорбитанта. Oxyz — система координат, связанная с гирокамерой: 1 — гирокамера с ротором; 2 — наружное карданово кольцо; 3 — пружина; 4 — демпфер; 5 — потенциометр.
Гироориентатор
Гироориента'тор, гироскопическое устройство, предназначенное в общем случае для определения местоположения объекта и параметров его движения. Г. основан на использовании гироскопов в сочетании с акселерометрами и вычислительным устройством. Основные части Г. — гироинерциальная вертикаль (см. Гировертикаль), которая воспроизводит вертикаль места (плоскость горизонта) и определяет составляющие линейной скорости объекта, а также гироазимут (см. Гироскоп направления), осуществляющий азимутальную ориентацию акселерометров. Г. совместно с вычислительным устройством, устройствами коррекции от источников внешней информации (измерители скорости и координат) и др. приборами образуют инерциальную навигационную систему. Иногда под Г. понимают непосредственно инерциальную навигационную систему. Г. может определять координаты местоположения объекта (широту, долготу и др.) и параметры его движения (курс, скорость, высоту полёта, углы атаки, скольжения и др.).
А. Ю. Ишлинский, С. С. Ривкин.
Гирополукомпас
Гирополуко'мпас, гироскопическое устройство для определения углов рыскания (изменения курса) и углов поворота объекта вокруг вертикальной оси, см. Гироскоп направления.
Гирорулевой
Гирорулево'й, то же, что авторулевой.
Гироскоп
Гироско'п (от гиро... и ...скоп), быстро вращающееся твёрдое тело, ось вращения которого может изменять своё направление в пространстве. Г. обладает рядом интересных свойств, наблюдаемых у вращающихся небесных тел, у артиллерийских снарядов, у детского волчка, у роторов турбин, установленных на судах, и др. На свойствах Г. основаны разнообразные устройства или приборы, широко применяемые в современной технике для автоматического управления движением самолётов, морских судов, ракет, торпед и др. объектов, для определения горизонта или географического меридиана, для измерения поступательных или угловых скоростей движущихся объектов (например, ракет) и многое др.
Свойства Г. проявляются при выполнении двух условий: 1) ось вращения Г. должна иметь возможность изменять своё направление в пространстве; 2) угловая скорость вращения Г. вокруг своей оси должна быть очень велика по сравнению с той угловой скоростью, которую будет иметь сама ось при изменении своего направления.
Простейшим Г. является детский волчок, быстро вращающийся вокруг своей оси ОА (рис. 1); ось ОА может изменять своё положение в пространстве, поскольку её конец А не закреплен. У Г., применяемых в технике, свободный поворот оси Г. можно обеспечить, закрепив сё в рамках (кольцах) 1, 2 т. н. карданова подвеса (рис. 2), позволяющего оси АВ занять любое положение в пространстве. Такой Г. имеет 3 степени свободы: он может совершать 3 независимых поворота вокруг осей АВ, DE и GK, пересекающихся в центре подвеса О, который остаётся по отношению к основанию 3 неподвижным. Если центр тяжести Г. совпадает с центром О, то Г. называется астатическим (уравновешенным), в противном случае — тяжёлым.
Первое свойство уравновешенного Г. с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное направление. Если эта ось вначале направлена на какую-нибудь звезду, то при любых перемещениях основания прибора и случайных толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно земных осей. Впервые это свойство Г. использовал французский учёный Л. Фуко для экспериментального доказательства вращения Земли вокруг её оси (1852). Отсюда и само название «Г.», что в переводе означает «наблюдать вращение».
Второе свойство Г. обнаруживается, когда на его ось (или рамку) начинают действовать сила или пара сил, стремящиеся привести ось в движение (т. е. создающие вращающий момент относительно центра подвеса). Под действием силы Р (рис. 3) конец А оси АВ Г. будет отклонять не в сторону действия силы, как это было бы при невращающемся роторе, а в направлении, перпендикулярном к этой силе; в результате Г. вместе с рамкой 1 начнёт вращаться вокруг оси DE, притом не ускоренно, а с постоянной угловой скоростью. Это вращение называется прецессией; оно происходит тем медленнее, чем быстрее вращается вокруг своей оси АВ сам Г. Если в какой-то момент времени действие силы прекратится, то одновременно прекратится прецессия и ось АВ мгновенно остановится, т. е. прецессионное движение Г. безынерционно.
Величина угловой скорости прецессии определяется по формуле:
где М — момент силы Р центра О, a = áАОЕ, W — угловая скорость собственного вращения Г. вокруг оси АВ, I — момент инерции Г. относительно той же оси, h = АО — расстояние от точки приложения силы до центра подвеса Г.; второе равенство имеет место, когда сила Р параллельна оси DE. Из формулы (1) непосредственно видно, что прецессия происходит тем медленнее, чем больше W, точнее, чем больше величина H = IW, называется собственным кинетическим моментом Г. Как найти направление прецессии Г. см. рис. 4.
Наряду с прецессией ось Г. при действии на неё силы может ещё совершать т. н. нутацию — небольшие, но быстрые (обычно незаметные на глаз) колебания оси около её среднего направления. Размахи этих колебаний у быстро вращающегося Г. очень малы и из-за неизбежного наличия сопротивлений быстро затухают. Это позволяет при решении большинства технических задач пренебречь нутацией и построить т. н. элементарную теорию Г., учитывающую только прецессию, скорость которой определяется формулой (1). Прецессионное движение можно наблюдать у детского волчка (рис. 5, а), для которого роль центра подвеса играет точка опоры О. Если ось такого волчка поставить под углом АОЕ к вертикали и отпустить, то она под действием силы тяжести Р будет отклоняться не в сторону действия этой силы, т. е. не вниз, а в перпендикулярном направлении, и начинает прецессировать вокруг вертикали. Прецессия волчка также сопровождается незаметными на глаз нутационными колебаниями, быстро затухающими из-за сопротивления воздуха. Под действием трения о воздух собственное вращение волчка постепенно замедляется, а скорость прецессии w соответственно возрастает. Когда угловая скорость вращения волчка становится меньше определенной величины, он теряет устойчивость и падает. У медленно вращающегося волчка нутационные колебания могут быть довольно заметными и, слагаясь с прецессией, существенно изменить картину движения оси волчка: конец А оси будет описывать ясно видимую волнообразную или петлеобразную кривую, то отклоняясь от вертикали, то приближаясь к ней (рис. 5, б).
Другой пример прецессионного движения даёт артиллерийский снаряд (или пуля). На снаряд при его движении, кроме силы тяжести, действуют силы сопротивления воздуха, равнодействующая R которых направлена примерно противоположно скорости центра тяжести снаряда и приложена выше центра тяжести (рис. 6, а). Невращающийся снаряд под действием силы сопротивления воздуха будет «кувыркаться» и его полёт станет беспорядочным (рис. 6, б); при этом значительно возрастет сопротивление движению, уменьшится дальность полёта и снаряд не попадёт в цель головной частью. Вращающийся же снаряд обладает всеми свойствами Г., и сила сопротивления воздуха вызывает отклонение его оси не в сторону действия этой силы, а в перпендикулярном направлении. В результате ось снаряда медленно прецессирует вокруг прямой, по которой направлена скорость vc, т. е. вокруг касательной к траектории центра тяжести снаряда (рис. 6, в), что делает полёт правильным и обеспечивает на нисходящей ветви траектории попадание снаряда в цель головной частью.