А. Ю. Ишлинский, С. С. Ривкин.
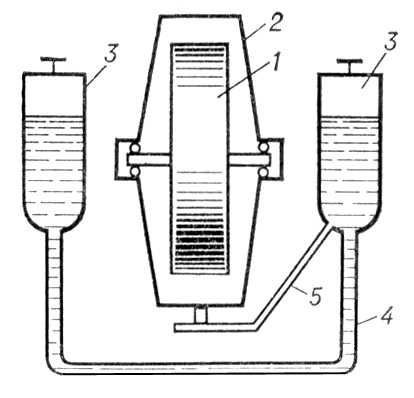
Рис. 2. Принципиальная схема чувствительного элемента однороторного гирокомпаса с ртутными сосудами: 1 — ротор; 2 — гирокамера; 3 — сосуды с ртутью; 4 — соединительная трубка; 5 — лапа.
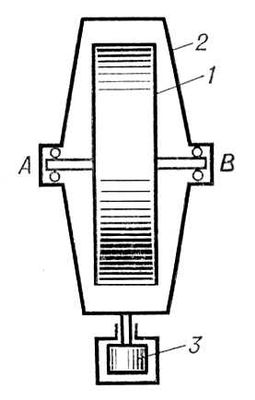
Рис. 1. Принципиальная схема чувствительного элемента однороторного гирокомпаса с маятником: 1 — ротор; 2 — гирокамера; 3 — груз.
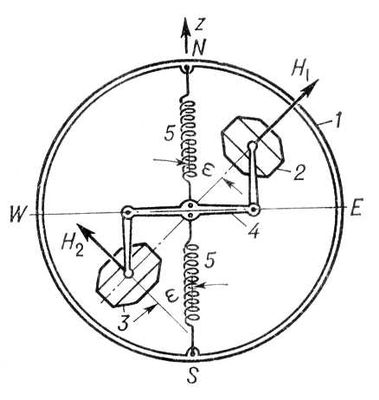
Рис. 3. Принципиальная схема чувствительного элемента двухроторного гирокомпаса. NS и WE — направления север — юг и восток — запад; H1, H2 — кинетические моменты гироскопов; 1 — гиросфера; 2, 3 — гироскопы; 4 — спарник; 5 — пружины.
Гирокотилиды
Гирокотили'ды (Gyrocotyloidea), класс плоских паразитических червей, занимающий промежуточное положение между ленточными червями и моногенетическими сосальщиками. Длина тела обычно 2—3 см, реже до 10 см. 5 видов (самостоятельность некоторых видов оспаривается); обитают в спиральном клапане (в кишечнике) глубоководных рыб — химер; встречаются в различных районах Мирового океана. Для Г. характерны: отсутствие кишечника и наличие сложно устроенного розетковидного органа прикрепления на заднем конце тела. Из овального яйца, снабженного ножкой, развивается личинка —т. н. люкофора, с десятью одинаковыми крючками на заднем конце. Цикл развития, по-видимому, прямой. Многие относят Г. к подклассу цестодарий класса ленточных червей; некоторые считают их сильно видоизменившимися моногенетические сосальщиками.
Лит.: Быховский Б. Е., Онтогенез и филогенетические взаимоотношения плоских паразитических червей, «Изв. АН СССР. Серия биологическая», 1937, т. 4, с. 1353—82; Шульц О. С., Гвоздев Е. В., Основы общей гельминтологии, М., 1970.
Б. Е. Быховский.
Гиромагнитная частота
Гиромагни'тная частота', частота обращения свободного электрона (или иона) в ионизированном газе (плазме) вокруг силовых линий постоянного магнитного поля. На заряженную частицу, движущуюся с постоянной скоростью V, направленной перпендикулярно магнитному полю Н, действует Лоренца сила:
где е — заряд электрона, с — скорость света. Под действием силы F ^ V (центростремительная сила) частица движется по окружности, причём частота обращения не зависит от её скорости, а определяется массой частицы m и величиной магнитного поля Н:
Г. ч. для земной ионосферы ~ 1,4 Мгц, для солнечной короны ~ 104 Мгц.
Г. ч. играет существенную роль в вопросах распространения электромагнитных волн в плазме, находящейся в постоянном магнитном поле, в частности при распространении радиоволн в ионосфере (см. также Циклотронная частота).
М. Б. Виноградова.
Гиромагнитное отношение
Гиромагни'тное отноше'ние, отношение магнитного момента атомных частиц (электронов, протонов, нейтронов, атомных ядер и т.д.) к их моменту количества движения. Подробнее см. Магнитомеханическое отношение.
Гиромагнитные явления
Гиромагни'тные явле'ния, эффекты, в которых проявляется связь между магнитными моментами и моментами количества движения частиц вещества. Подробнее см. Магнитомеханические явления.
Гиромагнитный компас
Гиромагни'тный ко'мпас, гироскопическое устройство, применяемое на движущихся объектах и предназначенное для определения курса объекта по отношению к плоскости магнитного меридиана. Г. к. представляет собой трёхстепенной астатический гироскоп, снабженный азимутальной и горизонтальной системами коррекции; азимутальная коррекция, чувствительным элементом которой является магнитная стрелка, удерживает ось гироскопа 1 в плоскости магнитного меридиана; горизонтальная коррекция удерживает внутреннее карданово кольцо 2 в положении, перпендикулярном наружному 3. Горизонтальная система коррекции состоит из потенциометра 5 (рис.) и датчика моментов 8. Азимутальная система коррекции состоит из магнитной стрелки 6, потенциометра 4 и датчика моментов 7. Принцип работы систем коррекции Г. к. аналогичен таковому в гировертикали с маятниковой коррекцией. Погрешность Г. к. может достигать нескольких градусов. Прибор широко распространён в авиации, применяется также в морском флоте.
Если магнитная система установлена вдали от гироскопа, то связь между ними осуществляется с помощью следящей системы (дистанционный Г. к.). Существуют приборы, у которых вместо магнитной системы применяется индукционный чувствительный элемент. Это т. н. гироиндукционный компас. У него, в отличие от Г. к., отсутствует азимутальный гироскоп и показания магнитного курса определяются с помощью индукционного чувствительного элемента, состоящего из пермаллоевого сердечника с обмоткой, ось которого устанавливается в плоскости магнитного меридиана. Для повышения точности прибора индукционный элемент стабилизируется относительно плоскости горизонта установкой его на гирокамере гировертикали.
А. Ю. Ишлинский, С. С. Ривкин.
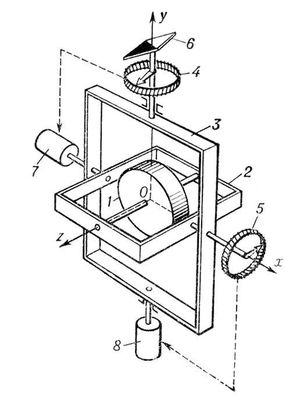
Принципиальная схема гиромагнитного компаса: 1 — ротор; 2, 3 — внутреннее и наружное кардановы кольца; 4, 5 — потенциометры; 6 — магнитная стрелка; 7, 8 — датчики моментов.
Гиромаятник
Гирома'ятник, один из типов гировертикали.
Гироорбитант
Гироорбита'нт, гироорбита, гиробинормаль, гироскопическое устройство для определения угла рыскания (отклонения от плоскости орбиты) искусственного спутника Земли. Г. представляет собой трёхстепенной астатический гироскоп, у которого относительно оси вращения наружного карданова кольца приложен вводимый пружинами восстанавливающий момент, а также момент демпфирования. Г. по принципу действия схож с маятниковым гирокомпасом, но роль маятника в нём выполняют пружины. Прибор (см. рис.) устанавливается на спутнике, который по сигналам от индикатора вертикали стабилизируется относительно местной вертикали. При этом, если угол рыскания спутника равен нулю, то ось вращения наружного карданова кольца 2 располагается по касательной к орбите, а ось Oz гироскопа — по нормали к ней. При отклонении оси гироскопа от указанного направления, вследствие того что движение спутника по орбите представляет собой вращение с угловой скоростью w вокруг оси, перпендикулярной к плоскости орбиты, и вследствие наличия пружин 3, возникают моменты, стремящиеся совместить ось Oz гироскопа с вектором w; это направление оси является устойчивым. При возникновении у спутника угла рыскания плоскость наружного карданова кольца 2 выходит из совмещения с плоскостью орбиты и с потенциометра 5, установленного на оси вращения гирокамеры 1, снимается угол рыскания спутника. Существуют др. схемы Г., близкие к схеме гирокомпаса с косвенной коррекцией. При этом сигнал для системы коррекции формируется на основании показаний индикатора вертикали, установленного на борту спутника. Г. широко используют в качестве курсового прибора, с помощью которого спутник ориентируется по азимуту относительно орбитальной системы координат.