HRESULT Method9([in] long cMax, [out, size_is(cMax)] short *rgs);
из чего следует такое использование со стороны вызывающей программы:
void f(IFoo *pFoo)
{
short rgs[100];
pFoo->Method9(100, rgs);
}
а также следующая реализация со стороны сервера:
HRESULT CFoo::Method9(long cMax, short *rgs)
{
for (long n = 0; n < cMax; n++)
rgs[n] = n * n;
return S_OK;
}
Но что, если реализация метода не может правильно заполнить весь массив допустимыми элементами? В предыдущем фрагменте кода, даже если метод инициализирует только первые cMax/2 элементов массива, заглушка со стороны сервера, тем не менее, передаст весь массив из cMax элементов. Ясно, что это неэффективно, и для исправления этого положения в IDL и NDR имеется третий тип массивов, – переменный массив (varying array).
Переменный массив – это массив, который имеет постоянную длину, но может содержать меньше допустимых элементов, чем позволяет его фактическая емкость. Вне зависимости от фактической длины массива будет передаваться единое непрерывное подмножество содержимого переменного массива. Для задания подмножества элементов, подлежащих передаче, IDL использует атрибут [length_is]. В отличие от атрибута [size_is], описывающего длину массива, атрибут [length_is] описывает фактическое содержимое массива. Рассмотрим следующий код на IDL:
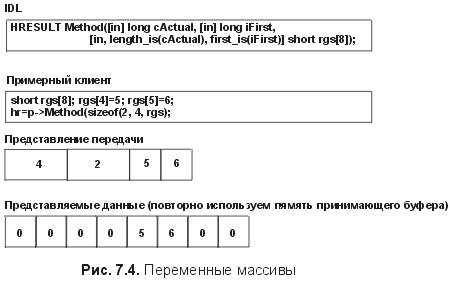
HRESULT Method10([in] long cActual, [in, length_is(cActual)] short rgs[1024]);
Во время передачи первым будет передано значение cActual, которое называется переменной длиной (variance) массива, и лишь затем сами величины. Для того чтобы переданный блок (region) мог появиться в любом месте массива, а не только в его начале, IDL и NDR поддерживают также атрибут [first_is], который указывает место, где начинается передаваемый блок. Данная величина смещения будет также передаваться вместе с содержимым массива, чтобы демаршалер знал, какая часть массива инициализируется. Аналогично тому, как атрибут [size_is] имел свою стилистическую вариацию [max_is], [length_is] также имеет вариацию – [last_is], в которой используется индекс вместо счетчика. Два следующих определения эквивалентны:
HRESULT Metnod11([in, first_is(2), length_is(5)] short rgs(8]);
HRESULT Method12([in, first_is(2), last_is(6)] short rgs[8]);
Оба метода инструктируют маршалер передавать только пять элементов массива, но демаршалирующая сторона выделяет место для восьми элементов и поступающие значения копируются в соответствующие места. Любые элементы, которых нет в передаваемом буфере, будут обнуляться.
Переменные массивы могут уменьшить объем сетевых передач, так как передаются только необходимые элементы. Однако, как показано на рис. 7.4, переменные массивы менее эффективны, чем совместимые массивы, в смысле избыточного копирования памяти. Массив, передаваемый в реализацию метода заглушкой со стороны сервера, размещен в отдельном блоке динамически распределяемой памяти («в куче»). Вначале этот блок в процессе инициализации заполняется нулями, а затем содержимое передаваемого буфера копируется в соответствующие места памяти. Это приводит к одному или двум дополнительным проходам по памяти массива перед входом в метод, что для больших массивов может ухудшать производительность. Нельзя сказать, что переменные массивы бесполезны, но при использовании только в качестве входных параметров переменный массив значительно менее эффективен, чем логически эквивалентный ему совместимый массив.
Подобно массивам постоянной длины, переменные массивы требуют от разработчика интерфейса задания соответствия/длины во время компиляции. Это обстоятельство значительно ограничивает использование переменных массивов, так как на практике затруднительно предсказать оптимальный размер буфера для всех вариантов использования интерфейса (например, у некоторых клиентов могут быть жесткие ограничения на использование памяти, а другие могут назначить более высокую плату за прием-передачу и поэтому предпочли бы большие буферы).
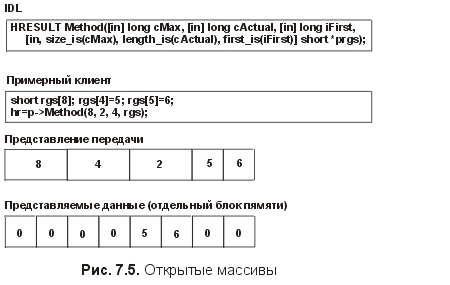
К счастью, и IDL, и NDR позволяют задавать как содержимое (переменную длину), так и длину (соответствие) для данного массива путем комбинирования атрибутов [size_is] и [length_is]. При использовании обоих этих атрибутов массив носит название совместимого переменного массива, или просто открытого (open) массива. Для задания открытого массива необходимо просто дать возможность вызывающей программе устанавливать и длину, и содержимое через параметры:
HRESULT Method13([in] cMax,
[in] cActual,
[in, size_is(cMax), length_is(cActual)] short rgs[]);
или
HRESULT Method14([in] cMax,
[in] cActual,
[in, size_is(cMax), length_is(cActual)] short rgs[*]);
или
HRESULT Method15([in] cMax,
[in] cActual,
[in, size_is(cMax), length_is(cActual)] short *rgs);
каждый из которых предполагает такое использование со стороны клиента:
void f(IFoo *pFoo)
{
short rgs[8];
rgs[0] = 1; rgs[1] = 2;
pFoo->Method13(8, 2, rgs);
}
Как показано на рис. 7.5, при передаче открытого массива маршалер сначала выяснит длину массива, а затем смещение и длину его фактического содержимого. Как и в случае переменного массива, длина массива может быть больше, чем количество передаваемых элементов. Это означает, что содержимое передаваемого буфера не может быть передано непосредственно вызывающей программе, поэтому используется второй блок памяти, что увеличивает расход памяти.
Совместимые массивы являются самым полезным типом массивов для входных параметров. Открытые массивы наиболее полезны для выходных или входных/выходных параметров, поскольку они позволяют вызывающей программе выделять буфер произвольного размера, несмотря на то, что передаваться будет только необходимое в каждом случае количество элементов. IDL для обеспечения использования этих типов выглядит следующим образом:
HRESULT Method16([in] long cMax,
[out] long *pcActual,
[out, size_is(cMax), length_is(*pcActual)] short *rgs);
из чего следует такое использование со стороны клиента:
void f(IFoo *pFoo)
{
short rgs[8];
long cActual;
pFoo->Method16(8, &cActual, rgs);
// .. process first cActual elements of rgs
// .. обрабатываем первые cActual элементов из массива rgs
}
в то время как реализация со стороны сервера выглядит примерно так:
HRESULT CFoo::Method16(long cMax,
long *pcActual,
short *rgs)
{
*pcActual = min(cMax,5);
// only write 1st 5 elems
// записываем только первые пять элементов
for (long n = 0; n < *pcActual; n++)
rgs[n] = n * n;
return S_OK;
}
Это позволяет вызывающей программе контролировать задание размеров буфера, а реализация метода контролирует фактическое количество переданных элементов.
Если открытый массив будет использоваться в качестве входного/выходного параметра, то следует указать переменную длину массива в каждом направлении. Если число элементов на входе может отличаться от числа элементов на выходе, то параметр переменной длины тоже должен иметь входной/выходной тип:
HRESULT Method17([in] long cMax,
[in, out] long *pcActual,
[in, out, size_is(cMax), length_is(*pcActual)] short *rgs);
что предполагает следующий код на стороне клиента:
void f(IFoo *pFoo)
{
short rgs[8];
rgs[0] = 0; rgs[1] = 1;
long cActual = 2;
pFoo->Method17(8, &cActual, rgs);
// .. process first cActual elements of rgs
// .. обрабатываем первые cActual элементов из массива rgs
}
Если число элементов на входе и на выходе одно и то же, то подойдет совместимый массив: