Рис. 403.
2) Сила образует острый угол со своим плечом рычага. Так, если сила F (рис. 403) действует на рычаг АОВ, то при действии ее в перпендикулярном к рычагу направлении плечо ее рычага было бы АО, но АО > О,с, так как АО наклонна к А, в то время как ОС (плечо рычага силы F) перпендикулярно к ней. Поэтому известная часть силы, потребная на отталкивание неподвижной точки, теряется для движения точки А. Это становится очевидным, если силу F разложить на две силы: АЕ и АД, действующие на точку А по указаниям стрелкой направлениям. AD — количество силы, идущее на отталкивание неподвижной точки (из книги «Краткий учебник анатомии человека» проф. Воробьева).
Из этого видно, что при уменьшении угла, образуемого силой с плечом рычага, величина AD возрастает за счет величины АЕ; тем меньше в этом случае утилизируются силы для движения. Эта сила превращается в О в случае установки силы F параллельно своему рычагу.
3) Сила образует с рычагом тупой угол (рис. № 404). На этом рисунке видно, что здесь плечо рычага короче, чем в вышеописанном случае, когда F была бы перпендикулярна BOA, потому что тогда сама ОА была бы плечом и известная часть силы F теряется на притягивание точки А в направлении AD, т. е. в ущерб движению. Чем тупее угол наклонения F, тем больше становится сила, составляющая AD за счет АЕ единственно тогда полезной для движения, параллельность F с плечом рычага имела бы последствием, как и в предыдущем случае, исчезновение составляющей АЕ и в результате — невозможность движения. Из всего сказанного для читателя будет понятно, что как только сила действует перпендикулярно к плечу своего рычага, то большая или меньшая часть ее расходуется на притягивание или на отталкивание рычага от точки его опоры, соответственно углу, образуемому действующими плечом и силой. Поэтому при выполнении того или иного приема такое положение нам выгодно, если мы своей силой будем действовать перпендикулярно силе противника, ясно, что результата не будет, ибо при этом, как видно из вышеизложенного, сила противника будет больше всех работоспособна при прямом угле. Другое дело, если мы будем в приемах всякое сгибание, разгибание, вращение, сжатие и на отжатие делать под углом (и лучше, как видно выше, под острым углом), то результаты скажутся сразу.
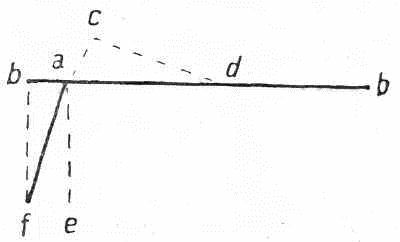
Рис. 404.
Из всего сказанного понятно, что если мыслить кости как рычаг, а мышцы как силу, то механизм движения будет слагаться из следующих моментов: 1) точка опоры, 2) точка приложения действующей силы и 3) точка преодолеваемого сопротивления.
Центром движения и одновременно точкой опоры кости служит ее сустав (подвижное соединение) с другой более подвижной относительно первой кости. Действующая сила — мышца — прилагается в точке ее прикрепления: сопротивление может находиться на разных концах рычага.
От комбинации расположения этих трех точек необходимо различать рычаги трех родов.
Рычаг первого рода (рис. № 405).
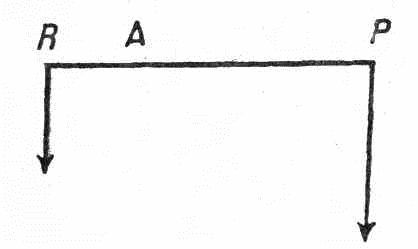
Рис. 405.
В рычаге первого рода неподвижная точка А находится между двумя другими подвижными — Р и R (R — преодолеваемый мышцей вес, тяжесть или давление во время проделывания приема, а Р — действующая на рычаг мышечная сила). Известное число мышц тела действует, как сила, приложенная к рычагу этого рода, например, при разгибании головы, разгибании локтевого и тазобедренного суставов; в последних случаях плечами действующей силы могут быть, смотря по обстоятельствам, локтевой отросток, вертлуг бедра.
Рычаг первого рода в человеческом организме почти всегда присутствует при разгибании.
Все приемы «Самбо» из группы «рычагов», т. е. все рычаги вверх, являются основанными на рычаге первого рода.
Рычаг второго рода.
В рычаге второго рода (рис. № 406) сопротивление R занимает промежуточное положение между точкой опоры А и приложением сил Р.
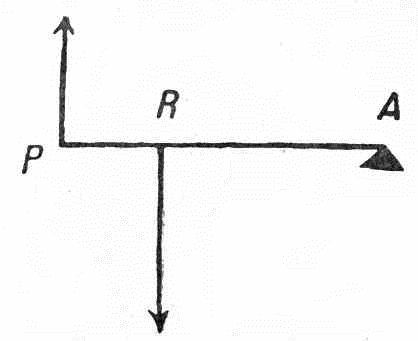
Рис. 406.
P—Мышцы тела плечевого сустава; R—Сила, давящая на локтевой сустав сверху (предплечье делающего прием); А—Упор в руку делающего прием. (захват за кисть нападающего).
В этом случае независимо от относительного взаиморасположения указанных трех точек, плечо рычага, прилежащее к действующей на плечо силе Р, всегда больше плеча сопротивления, т. е. АР > AR, этот рычаг еще обыкновенно зовут рычагом силы. Он невыгоден для человека в естественных движениях в смысле скорости движения, но он выгоден, когда на такой руке можно хорошо провести прием, так как у противника плечо рычага ближе к сопротивлению, меньше длины всего рычага.
Примером рычага этого рода служат кости бедра и колени при поднятии тела на носки и опоре стопы на головке плюсневых костей.
Когда конечность не служит для опоры, кости ее являются уже рычагами первого рода. Те же самые рычаги с теми же мышцами, в зависимости от потребности данного момента, могут быть применены то для развития силы, то для достижения скорости. Эта возможность обратимости составляет существенное отличие рычагов животного типа от рычагов механических. Все приемы «Самбо» групп «рычаги вниз» относятся к рычагам второго рода.
Рычаги третьего рода (рис. 407).
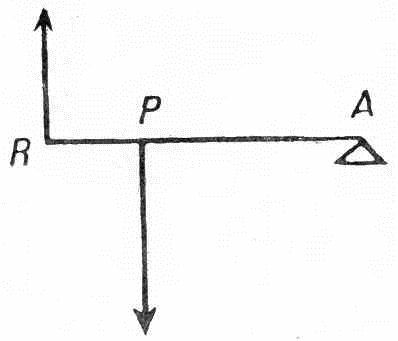
Рис. 407.
К рычагам третьего рода относится такой случай расположения указанных трех точек, когда действующая сила Р помещается между сопротивлением R и точкой опоры А.
В этом случае плечо сопротивления AR предполагается всегда длиннее плеча действующей силы, что благоприятствует развитию скорости точки R в ущерб к приложенной силе. Этот рычаг еще называют «рычагом скорости». Все сгибательные мышцы действуют в условиях такого рычага. Поэтому ряд приемов построен по принципу сгибания, например, вся группа «дожимов».
Но независимо от рычагов, описанных выше, мы можем наблюдать быстрое перемещение и порядка рычагов всех видов, потому что ни одна из частей двигательного аппарата не фиксирована в статике неподвижно, а все мышцы в той или иной мере участвуют в движении, сопротивлении и т. д. Сама опорная точка, которую мы только для данного и определенного движения считаем опорной, не является неподвижной, поэтому места приложения сил также не вполне постоянны и не связаны с одним каким-либо пунктом кости. Такое явление мы можем наблюдать в приемах, где имеется положение винта (скручивание). Кроме того, для лучшего усвоения приемов «Самбо» нужно учесть один очень важный и основной принцип биомеханики, что при сокращении мышц разгибатели развивают максимум силы (напряжение) в начале своего сокращения, в то же время как сгибатели — в конце. Это значит, что против «разгибателей» руки прием применяется быстрее, чем при работе против сгибателей рук, ног и т. д.
Поэтому быстрота в проделывании приема в данном случае играет решающую роль.
2. Общие замечания о плоскостях, осях, суставах в человеческом теле
Человеческое тело движется в разнообразных направлениях. Само движение подчинено основным правилам. Они выражены в изучении условно обозначенных осей и плоскостей движения человеческого тела.
Эти плоскости имеют три направления: а) горизонтальное, б) фронтальное, в) сагитальное (см. рис. № 408 — схема осей и плоскостей в теле человека — по проф. В. Воробьеву).
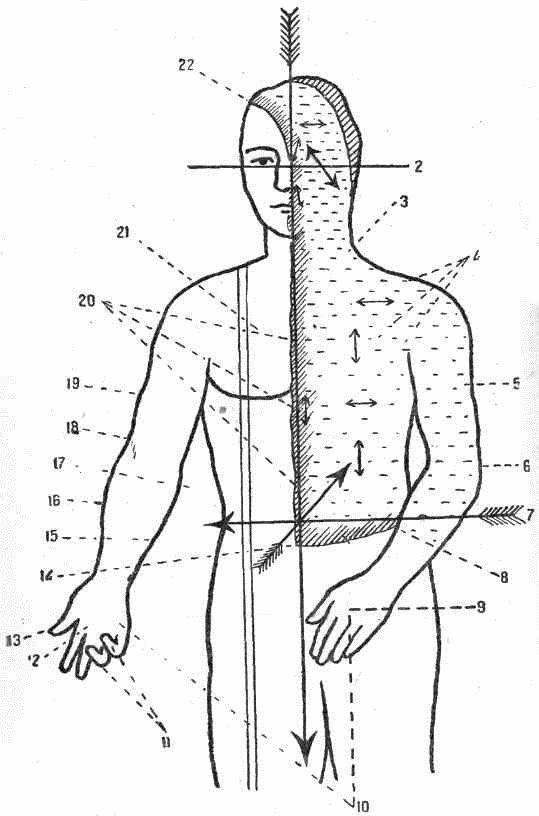
Рис. 408. Схема осей и плоскостей в теле человека (по проф. В. Воробьеву).
1. Вертикальная ось.
2. Поперечная ось.
3. Фронтальная плоскость (одна из фронтальных).
4. Линии, лежащие во фронтальной плоскости: горизонтальные и вертикальные.
5. Плечо, приведенное к туловищу (приведение плеча).