Человека-невидимку из фантастического романа Герберта Уэллса выдавали следы на снегу, а под дождем обрисовывались контуры его тела. Примерно так же обнаруживают атомные субмарины в Мировом океане.
Способов для этого существует несколько. Прежде всего плывущую на малой глубине подлодку довольно хорошо видно сверху — с самолета или со спутника. А если она движется, то за ней в воде остается вихревой след. Более того, если установить на дне бухты или пролива датчики, то они, периодически затеняясь корпусами судов, будут отмечать каждое их прохождение.
Еще один способ обнаружения субмарины-невидимки: в результате ее прохождения меняется давление воды — и это изменение обнаруживают гидростатические датчики. А сейсмические сенсоры могут отследить и изменения микроколебаний почвы, происходящие по мере того, как волны гидростатического давления достигают дна.
Большая масса подлодок изменяет также магнитное и гравитационное поле Земли. И эти микроизменения отслеживаются с помощью гравитометров и магнитометров, установленных на самолетах — охотниках за подлодками.
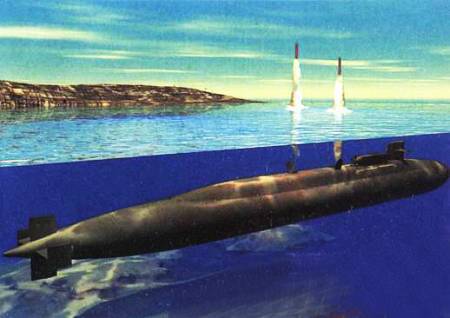
Американская субмарина запускает из-под воды ракеты «Трайдент».

Так выглядит приборная панель гидролокатора.
Однако самый распространенный способ является одновременно и самым древним. Еще гений Возрождения Леонардо да Винчи отмечал в своих дневниках: «Если ты, будучи в море, опустишь в воду отверстие трубы, а другой конец приложишь к уху, то услышишь идущие вдали корабли»…
В воде действительно гораздо лучше, чем в воздухе, распространяются звуковые и ультразвуковые колебания. Причем первые гидрофоны были установлены на русских субмаринах «Карп», «Пескарь», «Стерлядь», «Макрель» и «Окунь» специалистами Балтийского завода еще в 1909–1910 годах. То есть 100 лет назад!
Сигналы принимались размещенным в обтекателе угольным микрофоном, который во избежание помех буксировали за лодкой на кабель-тросе. Проведенные опыты показали, что маленький портовый катер выдавал себя шумом винтов за 5 кабельтовых — почти за километр.
Начиная с середины 30-х годов XX века шумопеленгаторные станции МАРС (малые акустические радарные станции) стали устанавливать практически на всех типах советских подлодок. На субмаринах типа М («малютках») — МАРС-8 с 8 датчиками, на Щ и С — соответственно МАРС-12 с 12 датчиками, а на самых больших К и Л — МАРС-16 с 16 приемными гидрофонами.
Перед Великой Отечественной войной, в 1940 году, прошла испытания ультразвуковая гидроакустическая станция «Тамир-1» для надводных кораблей — охотников за подлодками. Работа такого гидролокатора основывалась на посылке ультразвуковых импульсов и приеме сигналов, отраженных, к примеру, от корпуса подводной лодки. Пеленг (направление на цель) определялся поворотом излучателя или фазовращателями, а дистанция — по времени, которое импульс ходил до цели.
Конструкция первого такого прибора принадлежит французскому физику Полю Ланжевену и русскому эмигранту, инженеру Петру Шиловскому. Но запатентован он был англичанином Льюисом Ричардсоном вскоре после гибели «Титаника».
Так или иначе, но советская подлодка Л-3 произвела первую атаку на Балтике, пользуясь данными шумопеленгаторов, 13 ноября 1942 года, в самый разгар Второй мировой войны.
В эпоху «холодной войны», когда начиная с 50-х годов XX века в глубинах Мирового океана начали противостоять друг другу гигантские атомные подводные флоты СССР и США, техника выслеживания субмарин еще более усовершенствовалась. К тому времени гидроакустическими станциями, опускаемыми под воду на тросах, обзавелись и вертолеты. А противолодочные самолеты стали сбрасывать гидроакустические буи, которые устанавливали шумы субмарин или отраженное их корпусами эхо от взрывов сбрасываемых теми же самолетами небольших глубинных бомб. Информация передавалась на борт самолета-охотника, где анализировалась, и по сигналам определялись координаты подлодки.
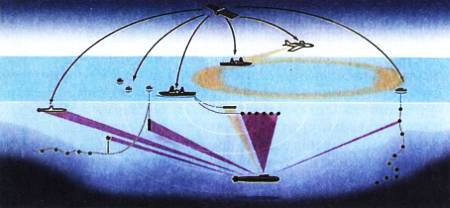
Для обнаружения субмарины в океане ныне используют самое различное оборудование и аппаратуру. Подлодка может быть засечена со спутника, например, по вихревому следу. Самолет с гравитометром и магнитометром на борту способен обнаружить ее по изменениям магпитного и гравитационного поля. Надводные кораблиохотники отслеживают перемещения субмарины с помощью гидроакустических буев, буксируемых и стационарных гидроантенн. И наконец, подводная лодка-охотник может обнаружить цель с помощью активного гидролокатора.
Мало того, в конце 50-х годов Соединенные Штаты пошли на огромные расходы, создав у побережья Атлантики и Тихого океана гигантские линии стационарных подводных гидрофонов. Звукоприемники соединялись кабелями с береговыми постами обработки сигналов.
Были разработаны специальные программы и процессоры, ставшие основой самых мощных в мире вычислительных комплексов. По характерному спектру сигнала компьютер может определить тип лодки, удаление до нее, ее скорость и курс.
Аналогичная компьютерная аппаратура только меньших размеров стала появляться и на борту самих субмарин. В результате созданный к началу 90-х годов прошлого века американский комплекс AN/UQQ-1 с буксируемыми антеннами способен уверенно обнаружить и классифицировать цель на дальности до 140 км, а в ряде случаев — и до 560 км!
Создатели субмарин ответили на это усовершенствованиями конструкции самих подлодок. Все силовые агрегаты субмарин стали размещать на шумопоглощающих фундаментах, широко применяли резинометаллические амортизаторы, упругие вставки в трубопроводах, а внешние корпуса подлодок начали укутывать в резиноподобные покрытия, слабо отражающие сигналы гидролокаторов.
Но главное внимание обратили на совершенствование винтов. Сейчас все подлодки оборудованы тихоходными винтами с саблевидными лопастями, работающими практически бесшумно. И поговаривают о том, что вскоре появятся субмарины вообще без винтов — с водометами или даже… неким подобием ласт и рыбьих плавников.
В итоге стационарные гидроакустические системы потеряли свою значимость и из-за снижения эффективности были законсервированы. Частично их стали использовать в научных целях, например, для прослушивания песен китов и иных звуков, издаваемых обитателями океана.
А для решения задач противолодочной обороны в США и других морских странах стали создавать быстроразвертываемые многоэлементные региональные системы освещения подводной обстановки (СОПО). Их доставляют на самолетах, надводных кораблях или подлодках в районы, где ожидаются боевые действия или маневры военно-морского флота потенциального противника. Датчики сбрасывают в море, подобно тем же гидробуям или донным минам, и они, затаившись в глубине, ловят малейшие шумы. Полученная информация передается на определенной частоте на заранее развернутые специальные антенны. Командный пункт СОПО производит анализ обстановки и с помощью космической связи передает все данные на командный пункт объединенного оперативного формирования.