Способность перевозить груз на внешней подвеске является важнейшей для еще одного вида работ, который предстоит выполнять аппарату, создаваемому по программе JTR. Речь идет о разгрузке морских контейнеровозов в случаях, когда невозможно произвести ее у причала обычным методом. Как известно, работа с внешней подвеской создает ряд проблем для конвертоплана с поворотными винтами из-за относительно низкой весовой отдачи этих аппаратов и характерной для них высокой удельной нагрузки на площадь, ометаемую винтом. Если эта функция будет определена для JTR как приоритетная, вертолеты, имеющие более высокую весовую отдачу и меньшую удельную нагрузку, получат существенное преимущество перед конвертопланами.
Следующим требованием является обеспечение перегоночной дальности (без полезной нагрузки) до 3890 км (2100 морских миль). Вероятно, это требование вызвано необходимостью автономного перелета будущего транспортного аппарата через Атлантику без дозаправки.
На рис. 1 представлены транспортные требования к JTR. При этом масса контейнера – 22,3 т – определяет максимальную грузоподъемность летательного аппарата и, соответственно, положение крайней левой точки на диаграмме, показывающей зависимость нагрузки от дальности, а максимальная перегоночная дальность определяет крайнюю правую точку.
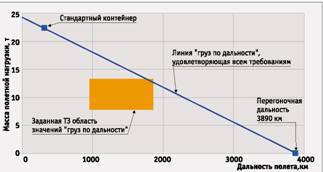
Рис.1. Графическое представление транспортных требований к JTR
Рис.1 свидетельствует, что если возможно создать летательный аппарат, способный перевозить стандартный контейнер и имеющий перегоночную дальность полета 3890 км, то такой аппарат будет обеспечивать максимальные значения требований к JTR по полезной нагрузке и дальности полета с ней.
Указанная в требованиях крейсерская скорость летательного аппарата должна составлять 324-463 км/ч. Верхняя граница этой скорости уже сегодня достигается конвертопланами, но недоступна вертолетам. Для сравнения, недавно разработанный боевой американский вертолет RAH-66 Comanche (рис.2), созданный с использованием всех последних технических достижений, удобообтекаемый и не имеющий громоздкой грузовой кабины, имеет крейсерскую скорость 298 км/ч и может достичь скорости 318 км/ч при кратковременных бросках. Очевидно, что даже эти скорости меньше заявленных в требованиях к JTR. С нашей точки зрения, предъявление подобных требований при создании транспортного вертолета, имеющего большое грузовое помещение, нерационально.

Рис. 2. Американский боевой вертолет RAH-66 Comanche
Крейсерские скорости существующих сегодня серийных транспортных вертолетов еще меньше, что объясняется их относительно большим вредным сопротивлением, а также особенностями, присущими несущему винту вертолета.
На рис.3 представлены зависимости от скорости полета аэродинамического качества изолированного несущего винта и вертолетов для разных значений эквивалентной площади вредного сопротивления CS, численно равных 0,6, 1,2, 1,8% площади, отметаемой несущим винтом. Здесь же приведены данные по некоторым современным вертолетам. Следует иметь в виду, что винт каждого вертолета имеет свою индивидуальную конфигурацию и поэтому кривая аэродинамического качества для каждого вертолета должна быть своя. Рис.3 дает приблизительное представление об общей закономерности изменения аэродинамического качества разных вертолетов при изменении крейсерской скорости.
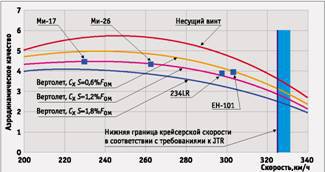
Рис.3. Зависимость аэродинамического качества вертолета от крейсерской скорости полета
Аэродинамическое качество изолированного несущего винта имеет максимум при скоростях от 240 до 270 км/ч. Максимум аэродинамического качества вертолета смещается в сторону меньших скоростей и зависит от относительного вредного сопротивления вертолета. Чем больше это сопротивление, тем меньшей скорости соответствует максимум качества.
Следует отметить, что у вертолетов с газотурбинными двигателями минимум километрового расхода топлива соответствует большей скорости, чем скорость максимального качества, что происходит из-за увеличения удельного расхода топлива при снижении мощности двигателей. Это объясняет, почему минимальный километровый расход топлива современных вертолетов достигается при скоростях несколько больших, чем скорости, соответствующие максимуму качества.
Чем выше степень переразмеренности двигателей, вызванная высоким уровнем требований к условиям висения на большой высоте при повышенной температуре или продолженного взлета при отказе одного двигателя, тем больше степень дросселирования двигателя на крейсерском режиме и больше разница между скоростью минимального километрового расхода топлива и скоростью, соответствующей максимуму качества.
В связи с тем, что при увеличении скорости растет производительность вертолета и экономическая эффективность его применения, иногда допускается назначение крейсерской скорости большей, чем скорость, соответствующая минимальному километровому расходу топлива. Однако такое превышение обычно не выходит за разумные пределы.
Выполнение крейсерского полета JTR на скорости 324 км/ч приведет к существенному снижению его аэродинамического качества, и поэтому такое требование тоже представляется завышенным применительно к вертолетам. Вероятно, более реальным будет требование о возможности выполнения ограниченного по времени скоростного броска (как это сделано для RAH-66 Comanche), причем с меньшей, чем у RAH-66, скоростью.
Остановимся теперь на условиях, при которых должно осуществляться висение вертолета со взлетным весом, обеспечивающим выполнение основных требований. Сошлемся еще раз на статью МакДаниела:
«Внешние условия при взлете (температура окружающей среды и высота площадки для взлета – прим. переводчика) являются критическим моментом для вертолетных проектов. С начала 70-х годов обычным стандартом для армейских вертолетов была способность висеть без влияния земли (HOGE) на высоте 1219 м при 35°С и обеспечивать вертикальную скороподъемность 2,54 м/с. Вертолеты Black Hawk и Apache были первоначально разработаны в соответствии с этими жесткими требованиями. Однако эти условия (1219м/35°) никогда не были реально испытаны в ходе операций армии США, проведенных в различных регионах мира».
Поскольку указанные требования считаются стандартом армии США, мы будем ориентироваться на них, одновременно соглашаясь и поддерживая мнение мистера МакДаниела о том, что такие требования являются завышенными.
Таковы в первом приближении требования к JTR. Посмотрим теперь, насколько им соответствует российский вертолет Ми-26. Приведенные ниже технические характеристики вертолета либо заимствованы из Руководства по летной эксплуатации (РЛЭ) сертифицированного гражданского транспортного вертолета Ми-26ТС, либо рассчитаны на основе этого документа. Однако скорости указываются истинные, а не приборные, которые приведены в РЛЭ.
Отметим, что некоторые приведенные в настоящей статье исходные данные и ограничения по вертолету Ми-26 (который предположительно может быть использован в качестве JTR) будут отличаться от значений, принятых в РЛЭ, что связано с возможностью военного применения. Так, например, количество членов экипажа в наших расчетах принимается условно равным 4 вместо 6 по РЛЭ. Не учитывается расход топлива, необходимого для выполнения предпосадочного маневра – так называемой «коробочки» – нехарактерного для военно-транспортных операций. Наконец, рассматриваемая в настоящей работе максимальная масса полезной нагрузки 22,4 т превышает предусмотренные РЛЭ 20 т.
В соответствии с заданием, под которое проектировался Ми-26, он должен перевозить полезную нагрузку массой 15 т на расстояние 500 км при пятипроцентном аэронавигационном резерве топлива. Такое задание вертолет выполняет при взлетной массе 49,65 т, что явилось основанием для назначения этой массы в качестве нормальной взлетной. Под нее определялись все основные летнотехнические характеристики. Для полной реализации транспортных возможностей вертолета при взлете с использованием эффекта влияния земли или с небольшим разбегом была определена максимальная взлетная масса, равная 56 т.