Следует также иметь в виду, что текущее значение глубины под судном отображается на шкале на правой стороне экрана. Это значение повторяется так же на экране и в цифровой форме.
Если судно неподвижно, то глубина под ним не меняется и, следовательно, линия будет прямой и горизонтальной (рис. 18).
При движении судна над неровным дном отметка глубины в правом углу экрана будет менять свое положение соответственно изменению глубины под датчиком эхолота. При уменьшении глубины каждая последующая точка будет располагаться выше предыдущей, при увеличении глубины – ниже предыдущей (рис. 19). В результате на экране появляется линия, повторяющая рельеф дна на пути следования судна.
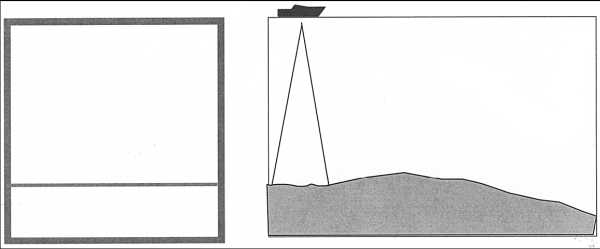
Рис. 18. Изображение на экране при неподвижном судне
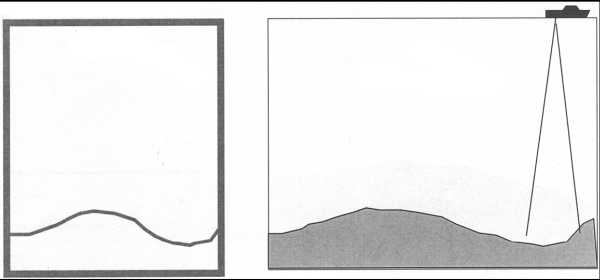
Рис. 19. Изображение рельефа дна на экране при движении судна
Для рыбака наибольший интерес представляют самые различные неоднородности рельефа дна, так как на них чаще всего ловиться рыба. Это могут быть песчаные «косы», намываемые течением с внутренней стороны на повороте реки (рис. 20), и резкие переходы на подмытых течением внешних берегах (рис. 21). Места с такими резкими переходами должны интересовать рыбака, т. к. на них может находиться крупная рыба.
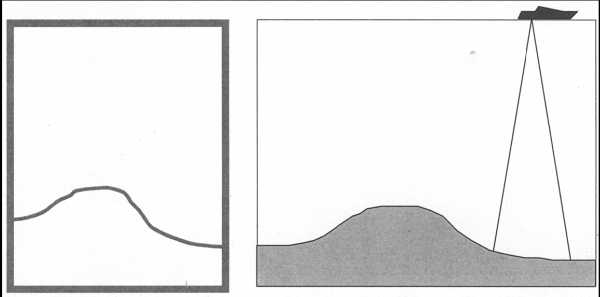
Рис. 20. Изображение на экране песчаной косы
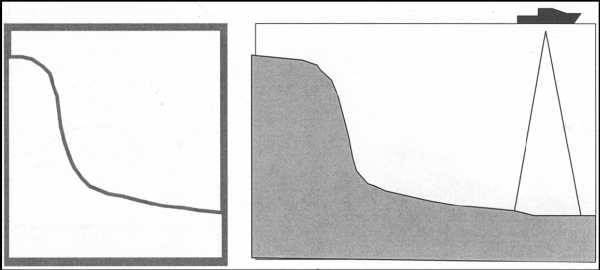
Рис. 21. Изображение на экране внешнего берега при повороте реки
На озерах Карелии и Белом море часто встречаются подводные скалы самых разных размеров – небольшие «луды и корги» (рис. 22), и обширные галечные либо каменистые «банки» – любимые места крупной хищной рыбы. Недаром профессиональный лов рыбы в море ведется, в основном, на банках. Автору этих строк как-то довелось на одной луде в Белом море в компании двух приятелей за каких-то 20 минут наловить на голые крючки ведро трески.
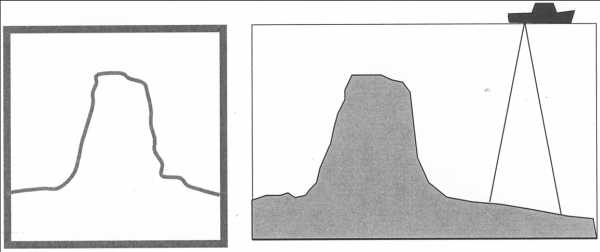
Рис. 22. Изображение на экране подводных скал
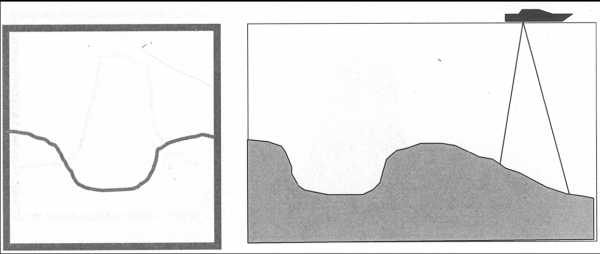
Рис. 23. Изображение на экране подводных ям
Еще один предмет поиска для рыбака – это ямы, в которых может находиться крупная хищная рыба (рис. 23).
Вообще, любые резкие изменения глубин привлекают рыбу и позволяют надеяться на ее обнаружение на данных участках. При ведении поиска с использованием эхолота следует искать участки, отличающиеся от преобладающего рельефа дна. На мелких участках нужно искать впадины и ямы, на глубоких участках – гребни, косы, луды, перекаты, на изрезанных участках – ровные площадки.
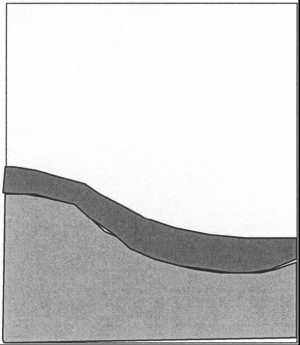
Рис. 24. Изображение на экране грунтов различной плотности
Еще один важный показатель, позволяющий определить перспективность того или иного участка для лова рыбы – структура дна. Структура дна говорит о том, из каких грунтов состоит дно – глина, песок, ил, скала или галька. С помощью эхолота точно распознать тип грунта невозможно, можно только различать его по плотности. На экране эхолота плотный грунт (глина, камень) отображается светлым тоном, а мягкие грунты – темным (рис. 24). По наличию ила и растительности можно судить о том, какая рыба может водиться на данном участке.
Большой интерес для рыбака представляют коряги или затонувшие стволы деревьев, около которых с большой степенью вероятности можно обнаружить рыбу. Они отличаются по плотности от грунта и обычно хорошо видны на экране эхолота (рис. 25). Такие предметы целесообразно запоминать в памяти приемника GPS, т. к. их повторное обнаружение осуществить намного сложнее, чем косу или перекат. То же самое относится и к другим относительно малоразмерным объектам – лудам, ямам и т. п.
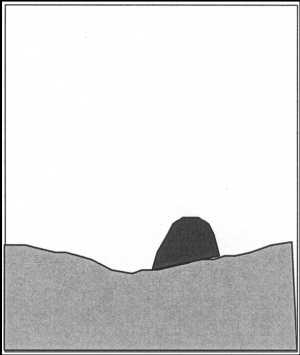
Рис. 25. Изображение на экране коряги или ствола дерева
Отображение рыбы
Ранее уже упоминалось, что на экране эхолота рыба отображается в виде дуг. Это происходит из-за того, что при прохождении рыбы через конус излучения расстояние от нее до преобразователя меняется – сначала оно уменьшается, а затем увеличивается снова. Поскольку по мере удаления от оси диаграммы направленности преобразователя энергия излучения убывает, то при прохождении рыбы через облучаемую зону толщина дуги изменяется – сначала она увеличивается, затем снова уменьшается. Размер дуги зависит, прежде всего, от ширины конуса излучения – чем шире конус, тем длиннее дуга (рис. 26), а также от скорости движения рыбы относительно судна. Чем выше эта скорость, тем слабее и бледнее эта дуга. Поэтому, при поиске рыбы с катера на ходу, получив на экране слабые дуги, стоит вернуться и на малой скорости пройти это место.
На форму дуги могут влиять и характерные особенности рыбы, позволяя, при наличии опыта, с некоторой вероятностью, определять вид рыбы, хотя не все опытные рыбаки разделяют эту точку зрения. Возможно, и проводились какие-либо теоретические и экспериментальные работы по распознаванию видов рыб с использованием эхолотов в интересах промыслового рыболовства, но мне такие материалы не встречались. Да и задачи обнаружения и распознавания профессионала и рыбака-любителя совершенно разные.
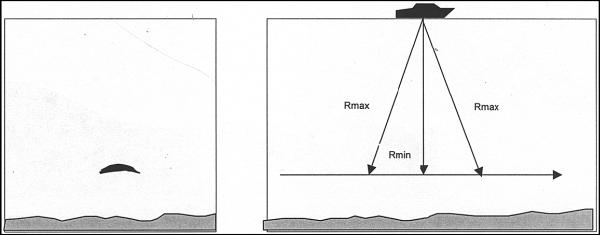
Рис. 26. Принцип образования дуги
В некоторых моделях эхолотов с цветным экраном (например, в эхолотах Garmin) отраженные сигналы окрашиваются различным цветом в зависимости от уровня их мощности. Красным цветом обозначаются самые мощные сигналы, оранжевым – сильные, желтым – средние, зеленым – слабые и синим – самые слабые. В монохромных версиях тех же эхолотов уровни принимаемых сигналов обозначаются Оттенками серого цвета – чем сильнее сигналы, тем темнее его отметка, и наоборот.
Обобщая имеющиеся в прессе материалы по распознаванию рыбы и результаты опроса среди пользователей эхолотов, можно сделать следующие предположения.
Многие представляют щуку как смещенную в один конец толстую дугу, сома – как одинокую толстую дугу. Некоторые виды рыб изображаются на экране эхолота в виде нескольких тонких дуг – например, судак или лещ. Однако, при отсутствии каких-либо экспериментальных данных достоверность этих оценок невелика.
Поскольку однозначно распознать рыбу невозможно, то для повышения достоверности оценки необходимо одновременно сопоставлять полученную дугу с рельефом и структурой дна, характерным для обитания тех или иных видов рыб. Такая работа требует большого опыта работы с эхолотом, понимания характерных особенностей, повадок и привычек различных рыб.
Для облегчения обнаружения и распознавания для рыбаков с малым опытом в большинстве любительских эхолотов имеется функция отображения обнаруженной рыбы в виде символов – «рыбок» различных размеров. Они формируются путем анализа по определенным алгоритмам мощности отраженных от подводных объектов сигналов. В большинстве эхолотов используются три градации размеров – мелкая, средняя и крупная, обозначаемые соответствующими символами (рис. 27).
Рис. 27. Отображение эхо-сигналов в виде символов – «рыбок»
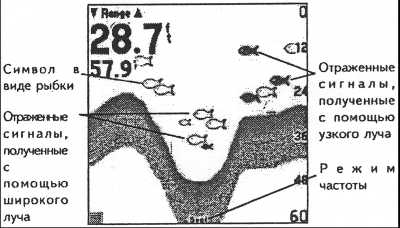
Рис. 28. Изображение символов на экране двухлучевых эхолотов