После этого множество «2», предшествовавшее завершающему процесс множеству «3», можно рассматривать в качестве завершающего, поскольку известны оценки каждого из его возможных состояний (максимальные полные выигрыши) и дальнейшая оптимизация последовательности шаговых управлений и выбор оптимальной траектории могут быть проведены только на ещё не рассмотренных множествах, предшествующих множеству «2» в оптимизируемом процессе (т.е. на множествах «0» и «1»).
Таким образом, процедура, иллюстрируемая рис. 6.13-2, работоспособна на каждом алгоритмическом шаге метода при переходах из n-го в (n — 1)-е множество, начиная с завершающего N‑ного множества до начального состояния системы.
В результате последовательного попарного перебора множеств, при прохождении всего их набора, определяется оптимальная последовательность преемственных шаговых управлений, максимально возможный полный выигрыш и соответствующая им траектория. На рис. 6.13-3 утолщённой линией показана оптимальная траектория для рассматривавшегося примера.
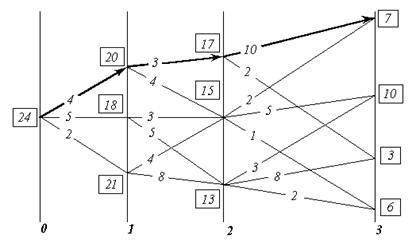
Рис. 6.13-3. К существу метода динамического программирования. Оптимальная траектория.
В рассмотренном примере критерий оптимальности — сумма шаговых выигрышей. Но как было отмечено ранее, критерий оптимальности может быть построен и как произведение обязательно неотрицательных сомножителей.
Поскольку результат (сумма или произведение) не изменяется при изменении порядка операций со слагаемыми или сомножителями, то алгоритм работоспособен и при переборе множеств возможных состояний в порядке, обратном рассмотренному: т.е. от исходного к завершающему множеству возможных состояний.
Если множества возможных состояний упорядочены в хронологической последовательности, то это означает, что расчётная схема может быть построена как из реального настоящего в прогнозируемое определённое будущее, так и из прогнозируемого определённого будущего в реальное настоящее. Это обстоятельство говорит о двух неформальных соотношениях реальной жизни, лежащих вне алгоритма метода:
1. Метод динамического программирования формально алгоритмически нечувствителен к характеру причинно-следственных обусловленностей (в частности, он не различает причин и следствий). По этой причине каждая конкретная интерпретация метода в прикладных задачах должна строиться на неформальном учёте реальных обусловленностей следствий причинами.
2. Если прогностика в согласии с иерархически наивысшим всеобъемлющим управлением, а частное управление, вложенное во всеобъемлющее управление, осуществляется квалифицировано, в силу чего процесс частного управления протекает в ладу с иерархически наивысшим всеобъемлющим управлением, то НЕ СУЩЕСТВУЕТ УПРАВЛЕНЧЕСКИ ЗНАЧИМОЙ РАЗНИЦЫ МЕЖДУ РЕАЛЬНЫМ НАСТОЯЩИМ И ИЗБРАННЫМ БУДУЩИМ.
Процесс целостен, по какой причине ещё не свершившееся, но уже нравственно избранное и объективно не запрещённое Свыше будущее, в свершившемся настоящем защищает тех, кто его творит на всех уровнях: начиная от защиты психики от наваждений до защиты от целенаправленной «физической» агрессии. То есть, если матрица возможных состояний (она же матрица возможных переходов) избрана в ладу с иерархически наивысшим всеобъемлющим управлением, то она сама — защита и оружие, средство управления, на которое замкнуты все шесть приоритетов средств обобщённого оружия и управления (см. раздел 8.5).
Объективное существование матриц возможных состояний и переходов проявляется в том, что в слепоте можно «забрести» в некие матрицы перехода и прочувствовать на себе их объективные свойства. Последнее оценивается субъективно, в зависимости от отношения к этим свойствам, как полоса редкостного везения либо как нудное «возвращение на круги своя» или полоса жестокого невезения.
Но для пользования методом динамического программирования и сопутствующими его освоению неформализованными в алгоритме жизненными проявлениями матриц перехода, необходимо СОБЛЮДЕНИЕ ГЛАВНОГО из условий:
В задачах оптимизации процессов управления метод динамического программирования <реального будущего средствами матрично-эгрегориального характера: — по умолчанию> работоспособен только, если определён вектор целей управления, т.е. должно быть избрано завершающее процесс определённое состояние.
В реальности это завершающее определённое состояние должно быть заведомо устойчивым и приемлемым процессом, объемлющим и несущим оптимизируемый методом частный процесс. Но выбор и определение определённых характеристик процесса, в который должна войти управляемая система по завершении алгоритма метода, лежит вне этого метода — в области «мистики» или в области методов, развитых в нематематических по своему существу науках и ремёслах.
Это означает, что применение метода динамического программирования к практическому решению задач в жизни (и прежде всего — к решению задач матрично-эгрегориального управления социальными и общеприродными процессами) основывается на интуиции и искусстве диалектики, обусловленных реальными нравственностью и религиозностью индивида (см. Часть 1 настоящего курса). Причина этого в том, что, решение задачи о гарантированной устойчивости и приемлемости конечного состояния процесса, оптимизируемого методом динамического программирования, предполагает постановку и получение ответов на вопросы:
1. А для чего необходимо достичь именно этого конечного состояния — вектора целей и каждой из входящих в его состав целей? — т.е. достижение каких целей высшего порядка обеспечивается в перспективе достижением частных целей, характеризующих конечное состояние оптимизируемого процесса?
2. Лежат ли эти цели высшего порядка в русле Промысла?
Второе значимое объективное ограничение возможностей практического применения связано с выявлением начального состояния и проистекает из следующего положения:
«Каково бы ни было состояние системы перед очередным шагом, надо выбирать управление на этом шаге так, чтобы выигрыш на данном шаге плюс оптимальный выигрыш на всех последующих шагах был максимальным», — Е.С. Вентцель, «Исследование операций. Задачи, принципы, методология». (Москва, «Наука»,1988 г., с. 109).
Неспособность определить вектор целей управления (достижением которого должен завершиться оптимизируемый в методе процесс) и (или) неспособность выявить исходное состояние объекта управления и хотя бы одного пути перехода из начального состоянии в завершающее не позволяет последовать этой рекомендации, что объективно закрывает возможности к использованию метода динамического программирования, поскольку начало и конец процесса, матрица переходов должны быть определены в пространстве параметров, на которых построена математическая (или иная) модель метода (она должна быть метрологически состоятельной, что является основой её соотнесения с реальностью). Причём определённость завершения оптимизируемого процесса и принадлежность его устойчивому приемлемому объемлющему процессу имеет управленчески большее значение, чем ошибки и некоторые неопределённости в идентификации (выявлении) начального состояния объекта управления.
Это тем более справедливо для последовательных многовариантных шаговых переходов, если матрица возможных состояний вписывается в пословицу «Все дороги ведут в “Рим”»,а которые не ведут в “Рим”, — ведут в небытие. Для такого рода процессов, если избрана устойчивая во времени цель и к ней ведут множество траекторий, то при устойчивом пошаговом управлении «расстояние»[290] между оптимальными траекториями, идущими к одной и той же цели из различных исходных состояний, от шага к шагу сокращается, вплоть до полного совпадения оптимальных траекторий, начиная с некоторого шага. Это утверждение тем более справедливо, чем более определённо положение завершающего процесс вектора целей в пространстве параметров. По аналогии с математикой это можно назвать асимптотическим множеством траекторий: асимптотичность множества траекторий выражается в том, что «все дороги ведут в “Рим”…»
290
В пространстве формальных параметров, описывающих процесс.