Существовали и другие недостатки — гидрофоны подводных лодок не могли работать при включенных дизелях, а это не позволяло эффективно следить за обстановкой на море, Под водой шнорхель мог обеспечивать лишь шестиузловый экономический ход, тогда как на поверхности подлодки IX серии ходили под дизелем экономическим ходом 12 узлов. Наконец, обитаемость старых лодок (в особенности VII серии) не была рассчитана на длительное пребывание под водой, по этой причине эффективность применения шнорхеля снижалась еще больше.
По-настоящему работоспособный шнорхель с шаровым клапаном появился только к 1945 году, он предназначался для установки на субмаринах XXI и XXIII серий. Его конструкция была не откидной, а телескопической, благодаря чему высота подъема навершия над уровнем моря могла регулироваться в зависимости от волнения. Другим важным усовершенствованием стало автоматическое отключение дизелей в случае перебоев с поступлением воздуха. В частности, при обнаружении противника лодка могла аварийно погрузиться на большую глубину, не тратя времени на смену движителя и блокировку воздуховодов.
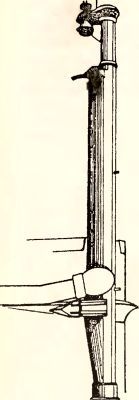
Рис. 172. Шнорхель раннего образца.
Максимальная скорость движения под водой со шнорхелем составила 12 узлов (на электромоторах — 13,5 узлов).
Кроме шнорхеля, существовали другие проекты снижения заметности ПЛ. В 1943 году начались работы по исследованию противорадиолокационного покрытия, которое планировалось наносить на рубки и корпуса подводных лодок (прародитель технологии «Stealth»). Но в то время подобные технологии не были развиты и проект остался нереализованным. Было разработано так называемое активное резонансное покрытие, поглощавшее импульсы радиолокатора. Кроме спец-покрытия, подводники пытались создавать пассивные помехи на лодке, идущей в надводном положении. К ее корпусу прикрепляли дипольные отражатели — ленты алюминиевой фольги (идея была заимствована у англичан: их ночные бомбардировщики в целях дезориентации радаров германской ПВО разбрасывали огромное количество алюминиевых полосок).
Разрабатывались и активные средства маскировки. В 1944 году был предложен проект ложной буксируемой цели, получивший кодовое обозначение «Wasseresel» («Морской осел»). Он представлял собой полностью погруженный буксируемый макет подлодки небольшого размера, начиненный мощным зарядом взрывчатки. Своими сигналами аппарат имитировал цель. По замыслу разработчиков, «Вассерэзель» должен был отвлекать внимание противолодочных сил от истинной цели, а в случае поражения глубинными бомбами — имитировать ее гибель. Проект оказался неудачным и работы над ним вскоре прекратили.
Еще более неудачным оказался другой проект дезориентации гидролокатора — создание специального химического состава, обильно выделявшего в воде пузырьки газа. При фиксации экипажем подлодки сигналов гидролокатора (последние воспринимались как сильные щелчки по корпусу) этот состав следовало подавать за борт. Тогда лодку окружала туча газовых пузырьков и гидроакустический контакт с ней прерывался. Однако пузырьки газа, поднимающиеся на поверхность, были слишком хорошо заметны и безошибочно указывали местонахождение подлодки, «корректируя» глубинное бомбометание.
Применение всех этих средств не могло решить проблему противодействия средствам активного обнаружения, в особенности РЛС. В поисках выхода немцы выяснили, что в конце 30-х годов во Франции проводились эксперименты с устройством, способным фиксировать облучение волнами дециметрового диапазона в радиусе 40 морских миль. Этот прибор назвали «Metox». Германские моряки немедленно воспользовались им: «метоксы», укрепленные на деревянных крестовинах (так называемый «Biskayakreuz» — «Бискайский крест»), стали эффективным средством борьбы с радиолокаторами. Получив сигнал от работающего радара противника, лодка могла теперь заблаговременно погрузиться и избежать внезапного удара.
Однако затем кривая потерь вновь поползла вверх — немецкие подлодки стали подвергаться атакам самолетов, снабженных сантиметровыми РЛС, работу которых не фиксировали детекторы «Метокс». После напряженных исследований по выявлению рабочей длины волн новой аппаратуры противника (вначале диапазон новых радаров не был известен даже приблизительно), потеряв почти полгода[29], немцы наладили выпуск коротковолнового детектора «Naxos». Последний оказался не очень удачным, кроме того, германской промышленности так и не удалось произвести необходимое количество приборов.
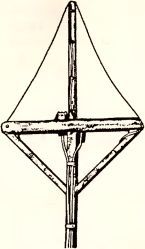
Рис. 173. Детектор излучения РЛС типа «Metox» с антенной «Бискайский крест».
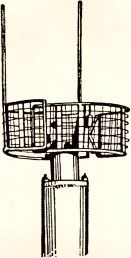
Рис. 174. Детектор излучения РЛС типа «Naxos».
Производство «наксосов» достигло приемлемых объемов только к началу 1945 года.
Немецкие подводники, в свою очередь, тоже применяли радары. В 1942 году на вооружение была принята РЛС дециметрового диапазона типа FuMo (Funkmessortung) 29, со сложной неподвижной многовибраторной антенной. Последнюю устанавливали в передней части ограждения рубки. Контур приемной антенны размещался над контуром передающей, обе они покрывались радиопрозрачным кожухом, снабженным козырьком. Часто антенну прикрывали дополнительным защитным щитом. Вслед за не вполне удачными дециметровыми радарами в 1944 году последовали FuMo 30, работавшие в сантиметровом диапазоне. Ее антенна кругового вращения стояла над рубкой. В связи с тем, что серийный выпуск FuMo 30 до самого конца войны шел с перебоями, ими удалось оснастить далеко не все лодки.
Глава 33. Сверхмалые подводные лодки
В 1943—44 годах немцы, постепенно сдававшие свои позиции на морях под ударами союзных флотов, начали обращаться к тактике «малой войны». По мнению их военных теоретиков, небольшие штурмовые отряды, снабженные различным специальным оружием, могли нанести серьезный ущерб английскому флоту в его базах. Основанием такому суждению послужили значительные успехи, которых в начале второй мировой войны добились итальянские и британские морские диверсанты — боевые пловцы. Подобная тактика получила полное одобрение со стороны Деница, являвшегося ярым сторонником применения сверхмалых подводных лодок.
Вначале немцы, находившиеся под впечатлением конструкции японских сверхмалых подлодок (впервые примененных для атаки на Перл-Харбор в декабре 1941 года), попытались приобрести разработки инженеров Страны Восходящего солнца, однако их союзники ревниво оберегали свои тайны. Поэтому прошло еще два года, прежде чем в Германии сумели создать первый образец отечественной мини-подлодки. Главным предназначением этих небольших, дешевых и малозаметных средств стало отражение предполагаемого вторжения англичан и американцев на север Франции.
В конце 1943 года в приморском городке Хайлигенхафен началось формирование нескольких флотских отрядов, получивших общее название «соединений К» (от термина Kleinkampfverbaende — соединения малого боя). В состав подобных формирований должны были войти группы боевых пловцов, человекоуправляемых торпед, сверхмалых подлодок и взрывающихся катеров. В целом мысль моряков Третьего Рейха двигалась в направлении, параллельном Японии, за исключением того, что экипажи подобных средств не должны были погибать вместе с противником.
На первом этапе численность личного состава отряда «К» составляла 30 человек, его командиром был назначен кадровый офицер-подводник Хельмут Хейе (Hellmut Heye) — впоследствии вице-адмирал. К весне 1944 года количество матросов и офицеров возросло настолько, что стало возможным формирование трех групп по 23 человека в каждой. Группы получили названия МЕК (Marine Einsatzkommando — морской оперативный отряд) и номера — соответственно 60, 65 и 71.
29
Германские ученые долгое время убеждали руководство военно-морского флота, что радиолокация в сантиметровом диапазоне принципиально невозможна.