В 1968 году была полностью пересмотрена вся схема полета комплекса Л-3 к Луне. В результате проведенных исследований стала очевидна большая выгода, с точки зрения энергетических затрат, отказа от формирования экваториальной орбиты ожидания и перехода на «плоские» схемы торможения при выходе на ОИСЛ и отлета к Земле после завершения экспедиции. Однако надо было преодолеть одну трудность. Дело в том, что предлагаемая схема могла обеспечить лишь кратковременное пребывание ЛК на поверхности: нельзя было допускать значительного ухода точки посадки из плоскости орбиты лунного орбитального корабля. Была возможность так выбрать точку прилунения, что и спустя заданное время, скажем двое-трое суток, орбита ЛОК подворачивалась и снова проходила через точку посадки, обеспечивая минимальную энергетику на участке взлета и сближения ЛК с ЛОК. Но при этом не было возможности экстренного старта ЛК в случае какой-либо аварийной ситуации — угол между плоскостями орбит ЛК и ЛОК превышал возможности заложенной энергетики на сближение.
Выход был найден. Было решено доработать систему управления ЛК так, чтобы она позволяла производить спуск с орбиты на поверхность Луны и взлет по пространственным траекториям — на техническом жаргоне «стрельба из кривого ружья». Исследования позволили найти приемлемый способ технической реализации этой идеи. Рассматривалось три способа:
— разворот гироплатформы системы управления по углу рыскания по заданной программе на активном участке траектории (боковой маневр);
— наклон гироплатформы системы управления (СУ) после установки ее вертикальной оси и предварительной ориентации по крену (закрутка ЛК);
— отработка программы по углу рыскания, рассчитываемой непосредственно перед стартом.
Остановились, как на самом эффективном, на втором способе. При тех параметрах посадочной и взлетной орбит, которые были выбраны как номинальные, легко достигалось боковое смещение конечной точки этих активных участков на 25–30 км, что было достаточно для обеспечения заданной длительности пребывания ЛК на поверхности Луны и выхода из возможных аварийных ситуаций.
Трудной задачей являлось нахождение способа расчета параметров программы изменения угла тангажа и функционала выключения двигательной установки (ДУ) ЛК при выходе из нештатных ситуаций на участке спуска на поверхность Луны. Известные нам методы терминального управления, как наиболее пригодные для таких задач, не могли быть реализованы на бортовых вычислительных машинах тех лет — слишком мало было для этого их быстродействие. Пришлось пойти по пути аппроксимации предварительно насчитанных наборов изменения параметров систем в зависимости от момента аварии. Метод оказался очень эффективным и был принят к реализации головным разработчиком системы управления ЛК.
Сейчас многие пишут о влиянии политических решений на нашу космическую программу, о приурочивании дат пуска наших космических систем к юбилеям и т. п. И пишут об этом весьма осведомленные люди (см., например, интервью В. П. Мишина в журнале «Огонек» № 34 за 1990 г.). Что ж, вероятно, эти моменты тоже имели место. Но не надо забывать, что события не существуют сами по себе, они ведь всегда окрашены эмоциями конкретных людей и всегда многоплановы. И трудно сказать, где эта история на самом деле «делается» — наверху, в тиши ведомственных кабинетов, или за кульманом конструктора и в заводских цехах. А мы, молодые инженеры, мало зная о проблемах главных конструкторов, понимая всю грандиозность задуманного, чувствовали себя первооткрывателями и страшно гордились своей работой, оказанным доверием и искренне хотели быть первыми. Жаркие споры велись о том, кому сколько машинного времени выделят на ближайшую ночь — тогда электронные вычислительные машины были еще у нас в диковинку — и, пожалуй, нам одним из первых довелось почувствовать вкус к работе со скоростью (сегодня при десятках и сотнях миллионов смешно вспоминать) 20 тысяч операций в секунду.
ОБЛИК ЛУННОГО КОРАБЛЯ
Как же посадить корабль на Луну? Какие нюансы нужно знать? Что учитывать? Что предусмотреть? Как спрогнозировать? На эти и многие другие вопросы нужно отвечать. Но кому? Проектировщикам NASA? Они были далеко, а из идеологических соображений вряд ли захотели бы помочь. Опыт создания космической техники, энтузиазм молодости вселял уверенность, что все проблемы мы одолеем. Созданный из разных коллективов проектный сектор по Лунному кораблю представлял тогда как бы единое творческое товарищество, помыслы которого были направлены на поиск оригинальных изобретательских решений по каждому агрегату корабля.
Но прежде чем «оттачивать» составные части, необходимо было обосновать и утвердить принятый облик ЛК. Первое представление о корабле, в части расчетных масс и габаритов, мы получили от ракетчиков-проектантов (рис. 4).
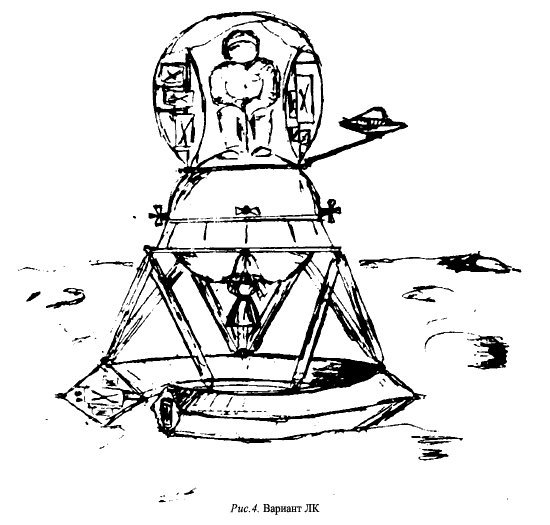
Было видно невооруженным глазом, что они стремились к созданию легкого ракетного блока. Понимая, что объект будет более устойчивым при невысоком расположении центра масс, аппаратуру, обеспечивающую функционирование корабля при посадке, они поместили в специальный торовый отсек, который за счет своей деформации обеспечивал гашение остаточной кинематической энергии, а за счет своей формы — равностороннюю устойчивость объекта во всех направлениях при соприкосновении с поверхностью.
Прикинули «центровку» корабля, так называли мы высоту расположения центра масс корабля от «опорной» поверхности. Она оказалась порядка 2,5 м. Даже оценочные расчеты показали, что торовое лунное посадочное устройство (ЛПУ) при заданных размерах не обеспечивает устойчивость корабля на поверхности. К выбору ЛПУ мы еще вернемся в специальном разделе, но было ясно, что четырехлапая схема (каждая с двумя подкосами) наиболее оптимальна для посадочных аппаратов.
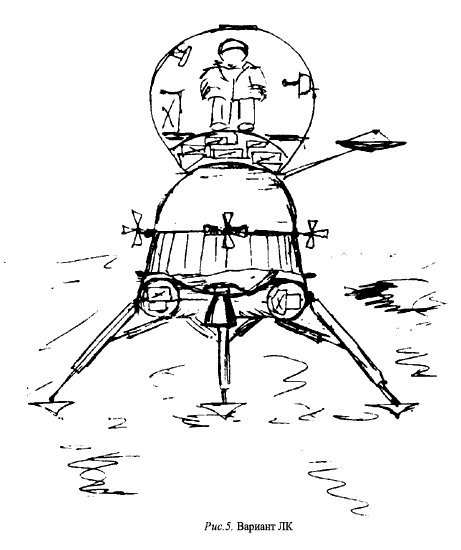
Понимая, что аппаратура, расположенная в торе, должна еще работать после посадки на Луне, ее сразу же перенесли в навесной приборный отсек. Рождается второй вариант схемы. Однако второй вариант схемы (рис. 5) не дал существенных преимуществ перед первым, так как только поднял центровку аппарата, а значит потребовал значительного увеличения базы ЛПУ. Под базой ЛПУ понимался размер между крайними точками опорного устройства.
Началась буквально мозговая атака на центровку. У входа в зал стоял большой кульман, и каждый предлагал свою схему в виде рисунка. Оставить свои предложения на кульмане мы, разработчики ЛК, просили каждого, кто к нам входил. Запомнился рисунок только что слетавшего в космос К.П.Феоктистова, который не только изобразил облик корабля, но дал оценку массы посадочных опор: приблизительно 800 кг.
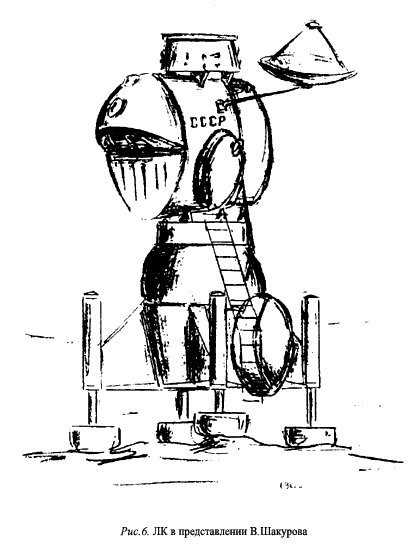
На рисунке 6 показана схема аппарата в представлении нашего сотрудника В.Н.Шаурова, которому была поручена разработка кабины. Как хотелось в то время заглянуть в будущее и увидеть в металле аппарат!
Борьба за центровку и массу ЛК шла по всем направлениям. Это были и сама кабина экипажа, и ракетный блок, и посадочное устройство. Кабина экипажа — это не только дом, но и место работы. Для Лунного корабля кабина должна быть особой. Ведь из нее осуществлялось управление ЛК на участке посадки, выбор места посадки и обеспечение самой посадки. Хочешь — не хочешь, а высота ее должна быть выше человеческого роста, ведь управление при прилунении можно было осуществлять только стоя, так как была необходимость обеспечить обзор нижней сферы, т. е. смотреть вниз. Расположенные как в первой схеме (см. рис. 4), приборные отсеки были неудобны и с точки зрения обеспечения условий работы аппаратуры, и с точки зрения удлинения связей между приборами. Просился еще один отсек, так и приняли. Эволюция кабины видна на рисунке 7.