Как совершить посадку пилоту на неизведанную планету? Как учесть все коварства поверхности? Эти вопросы постоянно терзали нас. Не последнюю роль играло наше небесное светило Солнце. Ведь если Солнце будет в зените, теней от неровностей не увидишь. Не увидишь их и когда нет Солнца. Следовательно, посадку нужно совершать, когда Солнце будет над горизонтом. Лучи Солнца более рельефно обрисовывают поверхность при угле около 7°. Значит посадку нужно совершать или утром, или вечером. Так что пилоту-космонавту мы несколько облегчили задачу. Но первым летел к Луне беспилотный корабль. Такая уж тенденция была заложена в основу всей советской пилотируемой космонавтики, что дорогу космонавтам прокладывал автомат. Поэтому ни одним из перечисленных, выше требований нельзя было пренебречь. Поисками районов посадки занимались серьезно и основательно. Основные усилия управленцев были направлены на поиски более щадящих условий посадки. Но разработка посадочного устройства велась в расчете на жесткие условия.
Вернемся к ЛПУ. Каким оно должно быть? Каждый представлял его по-своему. Проблема создания ЛПУ захватила весь наш сектор.
На одной из встреч с читателями известный поэт С. Михалков на вопрос: «Сколько длится Ваш рабочий день?» — ответил: «Я работаю 24 часа в сутки, так как и во время сна остаюсь в состоянии мысленного поиска». В этом ответе, возможно, не так уж много преувеличения. Творчески работающие инженеры, активные изобретатели порой долгие периоды времени находятся в состоянии непрерывной умственной работы. Вспомним хотя бы яблоко Ньютона. Бывает так, что сложные проблемы преодолеваются вдруг быстрее, чем предполагалось, а простые на первый взгляд инженерные задачи становятся неподатливыми.
Каждый из нас старался придумать оригинальную конструкцию. Очень не хотелось делать такие ноги, как у американцев. В нашем конструкторском зале стоял громадный кульман, и на нем каждый оставлял эскиз своего ЛПУ. Каких вариантов там только не было!
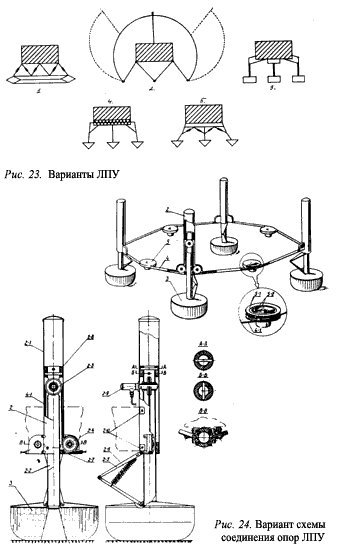
На рисунке 23 приведены некоторые варианты ЛПУ, а всего их было около двадцати. Один из вариантов был просто фантастическим. Кто-то предложил весь аппарат поместить в специальный бак с водой. При ударе вода сдемпфирует остаточные скорости, корабль опустится на поверхность, и тогда откроется кран, вода сольется и ура! В пользу этого варианта приводился довод, что если в стакан с водой положить сырое яйцо и бросить на пол, стакан разобьется, вода прольется, а яйцо останется целым. Мы не стали убеждаться в этом, так как абсурдность этого варианта была очевидна.
Начали обсуждать первоначальный вариант ЛПУ, предложенный ракетчиками (вариант 1). Опорное кольцо обладало одним бесспорным преимуществом — устойчивость во всех направлениях одинакова. Другими словами, в какую бы сторону ни летел ЛК, опрокидывающая сила будет во всех направлениях одинакова. Других преимуществ у кольца не было, а скорее наоборот. Кольцо становилось коварным, если хотя бы под одну из точек попадет камень, аппарат сразу становился неустойчивым и покачивался относительно преграды.
Устойчивыми на плоскости, как учит нас геометрия, являются предметы, имеющие три точки опоры. Такая трехточечная опорная система применена в аппарате «Сервейер». Да, перевернуть такой аппарат через опору сложно. Но как легко кувыркается стол или стул на трех ножках, вы сами можете убедиться. И опрокидывание происходит через линию, проходящую между ножками, она-то наиболее близка к осевой. Если в кольце все точки равно удалены от центра, то для такой же устойчивости (чисто теоретически) в трехопорной схеме требуется примерно в два раза большая база (расстояние между опорами). Вот теперь стали и мы убеждаться, что нужны четыре опоры, ведь по сравнению с кольцом они были по базе хуже только на 30 %. Дальнейшее увеличение числа ног у посадочного устройства уже не приводило к резкому преимуществу по запасам устойчивости.
В четырехопорных вариантах для дальнейших исследований оставили две схемы: классическую, похожую на американскую, и совершенно новую, необычную. Предложил ее А.А.Саркисьян. Надо отдать должное его нестандартному мышлению. Он был непревзойденным новатором всех механических узлов корабля. А схема его была такова. Представьте себе, что все четыре опоры связаны между собой замкнутым тросом, как показано на рисунке 24 (2 — посадочная опора; 3 — сотовые амортизаторы; 4 — замкнутый трос; 5—блок-тормоз).
Пойдет хотя бы одна нога вверх, остальные тут же начнут выдвигаться вниз, как бы встречая опорную поверхность. И как только последняя опора коснется поверхности, начнется повышенная перегрузка и в системе. Тогда срабатывает блок-тормоз, а конечные устройства опор в виде сотовых амортизаторов погасят энергию удара.
Замечательная схема! Все очень просто и заманчиво. Трудно было себе представить, что такой громадный аппарат удержится при резко уменьшенной базе, но расчеты показывали, что при заданных нами условиях он стоит. Молодые инженеры были в восторге от такой схемы. Но наши опытные руководители были более осторожны. Последовали вопросы, на которые нужно было отвечать. А если обрыв троса, отказ тормоза, увеличенные боковые скорости?.. Первые два вопроса были понятными. Сторонники схемы доказывали, что можно сделать с хорошими запасами работоспособности и трос, и тормоз. Нужно было ответить и на третий вопрос. И опять убеждаешься, что все гениальное просто. Все тот же А. А. Саркисьян предложил установить на каркас ЛПУ в районе опор пороховые двигатели, которые на первый взгляд увеличивают скорость встречи с поверхностью, так как их сопла направлены вверх. На самом же деле вопрос был во времени включения. Если их включить до касания, то они увеличат скорость встречи, а если в момент касания? Вот тут и заключалась идея. Двигатели как бы припечатывали аппарат к поверхности и тем самым заранее гасили весь опрокидывающий момент. Мы их так и назвали «двигатели прижатия»: они в конечный момент прилунения прижимают аппарат к поверхности с различным рельефом.
Но самое главное преимущество такой схемы было в том, что она позволяла вертикализировать аппарат при посадке. Если садились на площадку наклоном в 20°, ось аппарата отклонялась от вертикали на несколько градусов.
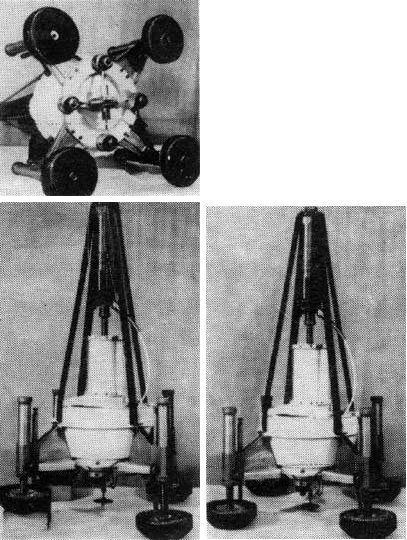
Рис. 25. Модели активного ЛПУ
Схема получила у нас название активной (рис. 25). Более привычная схема с базой между опорами, в полтора раза превосходящей базу активной схемы, как-то успокаивала глаз. Ни одни, ни другие сторонники той или иной схемы не могли доказать их неоспоримые преимущества. В пассивной схеме ни о какой вертикализации думать не приходилось, а сама схема даже усугубляла положение, а в активной схеме серьезной проблемой было создание оконечных амортизационных устройств, которые должны были гасить и вертикальную, и горизонтальную составляющие. Решили испытать все на моделях. Заказали модели активной и пассивной схемы. Какой выбрать масштаб? Поскольку на Луне сила тяжести примерно в шесть раз меньше земной, такой и приняли масштаб. Стремились выдержать все детали штатного исполнения.
Создание моделей — это целая наука, ведь результаты испытаний нужно потом перенести на натуру. Это хорошо знают аэродинамики, которым не под силу продуть целый самолет. Так и мы мучились над созданием моделей. Вопросов было много. Например, где найти пороховые двигатели малой тяги. Решили сделать так: поскольку равнодействующая всех четырех двигателей прижатия проходила через центральную ось в активной схеме, на эту модель поставили один центральный пороховой двигатель. Позже аналогично поступили и в пассивной схеме.