
Stratos ultralight — самый совершенный ил сверхмалых.
На заднее крыло удалось поставить мотор с толкающим винтом, который имеет гораздо более высокий КПД, чем применяемый обычно тянущий. В результате дальность полета крохотного самолета с размахом крыльев всего 5,4 м превысила 5000 км.
Интересны летающие модели сверхмалых самолетов.
Если их делать в масштабе 1:2 или 1:5, то в полете они в значительной мере сохраняют устойчивость и способность к планированию, как и их оригиналы.
На рисунке представлена контурная планирующая модель самолета Stratos ultralight, имеющего самое большое аэродинамическое качество среди всех сверхмалых самолетов. Модель состоит из двух частей — стреловидного крыла с фюзеляжем и с вертикальным оперением, а также заднего прямого крыла. Первая часть модели вырезается из сложенного пополам листа ватмана.
Для соединения крыльев при помощи клея на вертикальном оперении вдоль пунктирных линий делаются отгибы. Такие же отгибы имеются и на концах прямого крыла. Они играют роль вертикальных перемычек, уменьшающих сопротивление.
Для придания модели поперечной жесткости, ее фюзеляж раскрыт в виде буквы «V» и сверху заклеен овальной перемычкой, на которой крепится груз, служащий для установки правильного положения центра тяжести модели. В нашем случае это сложенная пополам полоска кровельного железа размерами 10x120 мм. После несложной регулировки, модель начинает летать так хорошо, что ей не хватает места в обычной комнате.
А. ВАРГИН
Рисунки автора
ПОЛИГОН
Загадка механического паука
Дорогая редакция!
На одном из стендов выставки НТТМ в 2008 году я сфотографировал странную шагающую модель, похожую на паука. Но поговорить с участниками стенда не успел. Не знаете ли вы, как эта модель может быть устроена?
Максим Царьков, г. Тула

Человек издавна пытается подражать живой природе. На первых порах с этой целью создавались механические подобия живых существ и даже людей. Так, задолго до нашей эры у китайских императоров были рычащие механические драконы и поющие птицы. Европейцам, если верить легендам, показывали механического рыцаря, который демонстрировал свое умение владеть мечом, что позволяло императору гордиться мастерством своих подданных. Сохранились смутные сведения о механических куклах в Древнем Риме. Но достоверно в Европе такие «игрушки» появились позднее.
По преданию, немецкий философ Альберт Великий (ок. 1193–1280), потратив 20 лет труда, создал механическую женщину, которая могла говорить и ходить. Его ученик, знаменитый богослов Фома Аквинский, вероятно, испугавшись, ударил ее палкой, и она рассыпалась на множество металлических деталей.
Более ничего подобного Альберт Великий сделать не успел, однако оставил нам немало сбывшихся предсказаний. Среди них точно назвал столетие открытия Америки — «берега по ту сторону Геракловых столбов», а также время, когда люди полетят на Марс и Луну. Было у него и предсказание, относящееся к нашей теме: «Будет создана шагающая машина, в которой сидят люди».

Шагающий робот очень сложен.
Предсказание Альберта Великого сбылось: уже давно созданы, например, шагающие экскаваторы. Есть и военные роботы, способные двигаться по сильно пересеченной местности.
Часто они похожи на рыцарей в жестких панцирях или на крабов. Двигаются они очень даже неплохо. Один из таких роботов, получивший название BigDog, разработан в США. Он сохраняет равновесие даже на льду, может скакать на своих четырех ногах рысью и иноходью.
Есть роботы, прекрасно лазающие по деревьям, по ровным каменным стенам, умеющие ходить по потолку. Вот только делают они это слишком медленно или, лучше сказать, не очень быстро. Специалисты считают, что дело в недостаточной мощности управляющего компьютера. Хоть он и делает миллиарды операций в секунду, а мало — нужны триллионы. Может быть, это и так, но вспомним: даже обычная муха с ее крошечным мозгом летает с огромной для ее размера скоростью и в доли секунды успевает оценить опасность и спастись. Так что компьютер компьютером, но очень важен еще и алгоритм движения робота.
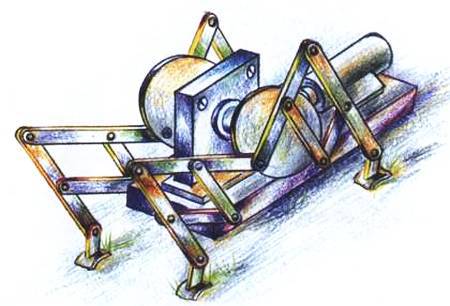
Несколько рычагов и шарниров — вот и вся «начинка» механического паука.
Уже упомянутые шагающие экскаваторы существуют девяносто лет и передвигаются, не нуждаясь в сложных вычислительных комплексах. То же можно сказать о модели механического паука, фотографию которой прислал нам Максим Царьков. Главное, что ее отличает от многих других механизмов, — это простота.
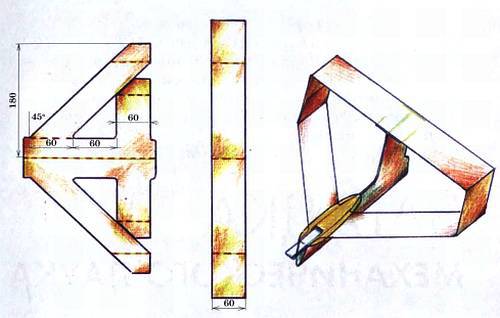
Паук имеет две пары ног, приводимых в действие кривошипом. Каждая нога состоит из четырех ведущих стержней, образующих параллелограмм. Один конец каждого из стержней параллелограмма соединен с неподвижной осью на корпусе или с пальцем кривошипа. На рисунке разными цветами показаны положения звеньев ног паука при полном обороте кривошипа.
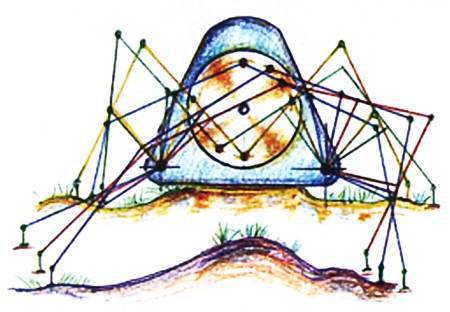
Отдельные фазы движения «механического наука» изображены цветом.
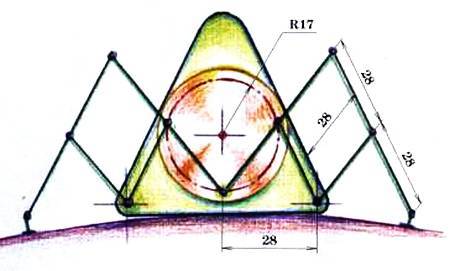
Схема привязки шарниров к корпусу шагающей машины.
Паук сначала приседает на брюшко, затем перебрасывает ноги вперед. Когда они станут на грунт, дальнейший поворот кривошипа поднимает тело паука и переносит его вперед. После этого начинается новое приседание. Если оба кривошипа вращаются с одной скоростью, паук движется прямо. Если изменять скорости вращения кривошипов относительно друг друга, паук будет двигаться криволинейно.
Простейшую модель паука можно сделать из деталей металлического набора «Конструктор» и редуктора с электромотором от самого простого игрушечного автомобиля. В таких игрушках оба задних колеса обычно расположены на общей оси. Если вместо них поставить два кривошипа, то получится привод для ног паука, движущегося прямолинейно. Если скорость вращения оси игрушечного автомобиля слишком велика, нужно добавить замедляющую передачу, которую можно сделать из деталей того же набора.
Шасси модели можно спаять из жести от кофейной банки, согнув ее блестящей стороной внутрь. Для того чтобы оно было прочным и выглядело аккуратно, проведите по линии сгиба один-два раза резаком по металлу. Ноги модели — из любого металла или пластмассы толщиной около 2 мм. Их размеры показаны на схеме.
В принципе батареи питания электромотора следует располагать рядом с ним на шасси. Но для первых экспериментов можно расположить их на пульте управления возле выключателя. При этом модель получится более легкой и сможет двигаться быстрее.
Далее можно вести эксперименты с моделью в самых разных направлениях, прежде всего, сделать паука управляемым. Для этого на правом и левом борту модели можно установить отдельные электромоторы с одинаковыми редукторами и замедляющими передачами для раздельного привода правой и левой пары ног. Ток к ним нужно подавать раздельно. Нажатием разных кнопок на пульте вы сможете получить движение вперед, поворот вправо и влево. Если же добавить тумблер, переключающий полярность питания электромоторов, получите движение назад. Ваша модель станет полностью управляемой.