Нетрудно представить себе, что самое обыкновенное колесо, даже без хитрых грузов, стало бы само вращаться со страшной скоростью, если бы под одну его половину положить лист «кэйворита». Половина его, сохранившая вес, всегда перетягивала бы другую, ставшую невесомой; средневековая идея ppm была бы легко реализована.
Кэйвор и Бэдфорд использовали «кэйворит» для полета на луну. Такой же материал под названием «лунит» был применен коротышками — героями известного романа-сказки Н. Носова «Незнайка на луне», чтобы улететь с луны на землю. Но коротышки пошли еще дальше — нашли другой материал — «антилунит», нейтрализовавший действие первого!
Д. Борелли не был первым, кто отвергал уже в то время возможность создания механического ppm, основанного на использовании сил тяжести. Его позиция отражала более общую тенденцию. Пока изобретатели механических ppm ломали головы над очередными вариантами своих машин, постепенно развивалась механика (и не без их помощи — оттачивала свои положения в дискуссиях с ними). Она вырабатывала новые представления, которые шли дальше античной механики и позволяли количественно точно определить результат одновременного действия на тело нескольких сил. Тем самым новая наука подрывала «под корень» идейную базу механических ppm. Действительно, если выработано четкое правило, как подсчитать результат действия сил, прилагаемых к колесу (или колесам) ppm, то всегда легко определить, будет колесо в равновесии или нет. В первом случае двигатель работать не сможет. Если же, напротив, будет доказано, что неравновесие будет существовать постоянно, то ppm «может жить». Дело, таким образом, сводилось к установлению соответствующего закона механики (точнее, ее раздела — статики).
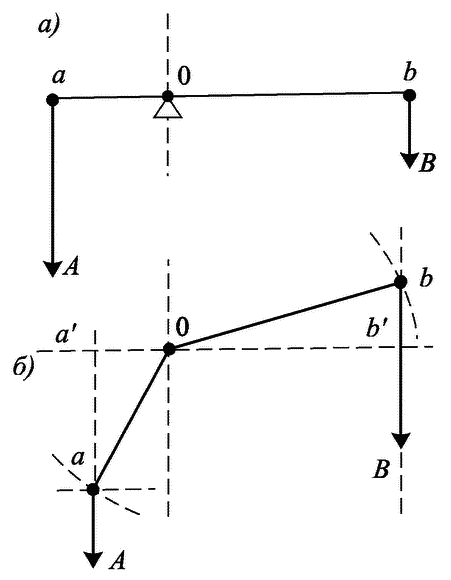
Первый шаг в этом направлении сделал, по-видимому, великий Леонардо да Винчи (1452-1519 гг.). В рукописи 1515 г. он ввел понятие, которое теперь называется в механике «статическим моментом силы». Со времен Архимеда был известен закон, который определял условия равновесия прямого рычага. Он составлял содержание VI теоремы Архимеда из сочинения по механике: «Два соизмеримых груза находятся в равновесии, если они обратно пропорциональны плечам, на которые эти грузы подвешены». Другими словами (рис. 1.9, а), если силу тяжести (т. е. силу, с которой грузы притягиваются к земле) изобразить в виде отрезков А и В соответствующих направлений и длины, то условие равновесия будет таким: А: В = Ob: Оа, или, что то же самое (следует из свойств пропорции), А ∙ Оа = В ∙ Ob.
Таким образом, условие равновесия рычага может быть выражено и так: «Произведения веса каждого груза на длину того плеча рычага, на котором он подвешен, должны быть равны».
При всей его важности закон рычага Архимеда не мог быть использован для анализа равновесия любого колеса механического ppm, работающего с твердыми или жидкими грузами. Дело в том, что для такого анализа нужно было уметь определять равновесие и для случая, когда сила веса груза направлена не под прямым углом к рычагу, как у Архимеда, а под любым углом — острым или тупым. Действительно, стоит посмотреть на рис. 1.3 или 1.6, чтобы увидеть, что сила тяжести направлена под самыми разными углами к соответствующим радиусам колеса. Выделим для примера два груза: один (В) расположен выше оси колеса, а другой (А) ниже (рис. 1.9, б). Как решить задачу в этом, более общем случае?
Леонардо нашел такое решение, он показал его на двух примерах (соответствующие рисунки из его рукописи показаны на рис. 1.10). Относящийся к левому рисунку текст предельно ясен: «Пусть AT — рычаг, вращающийся вокруг точки А. Груз О подвешен в точке Т. Сила А уравновешивает груз О. Проведем линии: АВ перпендикулярно ВО и АС перпендикулярно СТ. Я называю AT действительным рычагом, АВ и АС — «потенциальным рычагом». Существует пропорция N: О = АВ: АС».
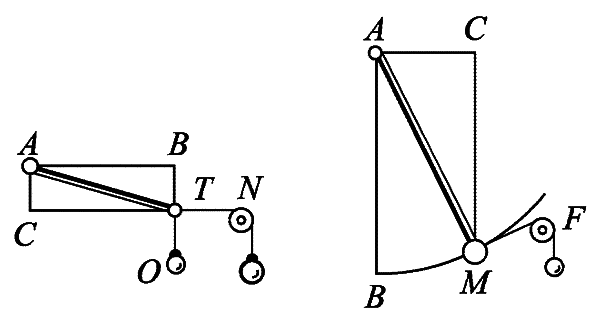
Очевидно, что это соотношение может быть переписано так: О ∙ АВ = N ∙ АС. Другими словами, для равновесия ломаного рычага нужно, чтобы произведения сил на соответствующие «потенциальные рычаги» были равны. Эти «потенциальные рычаги» есть не что иное, как проекции рычага AT на соответствующие оси, перпендикулярные направлению сил, т.е., говоря посовременному, на «плечо силы». Условие равновесия состоит в равенстве статических моментов сил, т.е. произведений сил на проекции плечей рычага на оси, перпендикулярные направлению этих сил.
Аналогичное соотношение было выведено Леонардо для случая, показанного на правом рисунке. Здесь F: М = АС: AM. Из него тоже вытекает равенство моментов сил: F ∙ AM = М ∙ АС.
Вернемся к примеру, показанному на рис. 1.9, б. Пользуясь условием Леонардо, получаем, что равновесие наступит при соблюдении равенства А ∙ а’O = В ∙ b’О. Для проверки возможностей любого механического ppm нужно сложить все моменты сил (грузов), расположенных справа от оси О, и то же проделать с грузами, расположенными слева. Первые стремятся повернуть колесо по часовой стрелке, вторые — против. Если общая сумма моментов будет равна нулю (так как их знаки противоположны), то колесо не двинется — наступит равновесие.
Таким путем легко показать, что несмотря на все ухищрения, сумма моментов сил у всех механических ppm равна нулю. Леонардо понимал это очень четко. Стоит только вспомнить слова из одной его записи по поводу ppm: «Искатели вечного движения, какое количество пустейших замыслов пустили вы в мир!»
К сожалению, записи Леонардо остались неизвестными ни его современникам, ни ближайшим потомкам. Только с конца XVIII в. началась планомерная расшифровка его тетрадей.
Задачу создания теории, позволяющей научно подойти к анализу механических ppm и ответить на вопрос об их работоспособности, решил англичанин Джон Уилкинс, епископ Честерский (1599-1658 гг.). Его работа была вполне самостоятельна, поскольку ему не были известны результаты Леонардо, полученные более чем на столетие раньше.
Уилкинс опубликовал свою теорию в книге «Математическая магия», вышедшей в 1648 г. на английском (а не на латинском!) языке. В ней совершенно четко говорится о статическом моменте силы — одном из основополагающих понятий статики.
Изобретатели механических ppm с грузами, основываясь на известном архимедовом законе рычага, полагали, что чем дальше от центра колеса находится груз, тем он сильнее должен поворачивать колесо. Это правило действительно верно, но только для горизонтального рычага (именно его рассматривал Архимед). Распространять его на все грузы, независимо от их расположения на окружности колеса, неверно. Уилкинс наглядно это показал. Ход его мыслей легко проследить с помощью рис. 1.11, на котором изображена схема колеса с центром в точке А. Горизонтальный диаметр DC колеса разделен на 10 равных частей, и через соответствующие точки проведены концентрические окружности с центром в точке А. В разных точках окружностей расположены одинаковые по весу грузы, характер движения которых надо определить. Если грузы расположены на горизонтальном диаметре, задача решается просто — на основе правила Архимеда. Например, груз в 1 фунт в точке С уравновесит 5 фунтов в В, поскольку плечо АС в 5 раз длиннее плеча А В. Уилкинс отмечает, что это соотношение останется в силе, даже если груз будет в точке Е или F, лишь бы они были на той же вертикали, что и С. Другая ситуация возникнет, когда грузы будут находиться не на горизонтальном диаметре, а выше или ниже его, как, например, грузы G, Н или I, К. Уилкинс правильно понял, что в этом случае сила, с которой они будут стремиться вращать колесо в соответствующую сторону, будет другой. Очевидно, что грузы I, К вообще в этом отношении бесполезны, а грузы G и Н потеряют часть своей силы. Чтобы определить действие каждого из них, нужно умножить его вес на длину того отрезка горизонтального диаметра, который находится между точкой А и вертикальной линией, проходящей через точку привеса груза. Для грузов G или Н это будет точка М.