На «Космосе-23» проверялись оптимальные законы управления, исследовались динамические характеристики, т. е. регистрировались и передавались на Землю по телеметрии параметры угловых поворотов в функции времени.
Исследование этих экспериментальных закономерностей в орбитальном полете дало возможность оценить отдельные компоненты сопротивления окружающей среды при движении спутника. Было установлено, что из всех внешних возмущающих сил: аэродинамических, гравитационных, светового давления, воздействия метеорной пыли, магнитных и плазменных воздействий наибольшее значение имеют силы аэродинамические и гравитационные. Кроме того, оказалось, что электрические машины с относительно большой массой ротора в условиях невесомости работают более надежно, чем на Земле. Это подтвердилось на последующих спутниках, снабженных электрическими двигателями довольно больших размеров, а именно на спутниках «Молния» и «Метеор».
Рис. 6. Общий вид искусственных спутников Земли «Космос-14» и «Космос-23»
При исследовании характеристик солнечных батарей на «Космосе-23» были (получены очень важные данные о «старении» фотоэлементов, которые на первых спутниках при длительной работе изменяли свои характеристики и в особенности при многократных резких изменениях температуры (тепловых ударах), возникающих, когда спутник и поверхности его солнечных батарей переходят от освещенной Солнцем части в тень Земли.
Этот переход, сопровождаемый резкими колебаниями температуры, отрицательно сказывался на механической прочности пластинок кремниевых фотоэлементов, а также прочности их механического крепления к панелям солнечных батарей.
Проведенные в последующие годы фундаментальные исследования по созданию надежно работающих в космосе солнечных батарей показали, что новые типы фотоэлементов и новые типы солнечных панелей могут функционировать на орбите непрерывно и безотказно не только в течение нескольких месяцев, но и в течение нескольких лет.
Система электропитания на спутниках создается с помощью аккумуляторной батареи, подключенной через релейно-контакторный аппарат и соответствующую кабельную систему к солнечной батарее. Так как поступление энергии от солнечной батареи не является непрерывным и по мере захода космического аппарата в тень Земли и выхода из нее процесс подзарядки то возникает, то исчезает, в системе электропитания установлен специальный автомат, исключающий возможность перезарядки батареи и тем самым вывода ее из строя или недозарядки, при которой можно лишиться необходимого количества энергии. Рассмотренная система электропитания в известной мере напоминает систему электроэнергетического снабжения автомобиля, в котором буферная аккумуляторная батарея подключена к заряжающему ее генератору через соответствующий аппарат, выполняющий аналогичную функцию. Однако для космического аппарата система автомата зарядки и разрядки является гораздо более сложной, так как рассчитана на движение спутника по орбите с периодическим чередованием теневых и солнечных участков.
При рассмотрении конструкции и динамики движения типового спутника мы упомянули проведенные эксперименты по «закрутке» космического летательного аппарата «Космос-14» вокруг своей оси, по превращению его в своего рода силовой гироскоп, ориентированный на Солнце. Используя этот принцип для создания спутника связи «Молния», советские конструкторы для обеспечения солнечной батареи энергией Солнца установили на спутнике «Молния-1», электродвигатель-маховик с большим моментом инерции ротора, соизмеримым с моментом инерции аппарата в целом. При ориентации спутника по двум осям на Солнце с помощью солнечных датчиков и газореактивной системы так, чтобы ось двигателя-маховика проходила через центр масс Солнца, можно было путем включения электродвигателя создать «силовой гироскоп» с осью вращения ротора, направленной на Солнце.
На рис. 7 представлена схема управления спутником за один цикл эллиптического движения его вокруг Земли. Из него видно, что над освещенным Солнцем полушарием Земли спутник с помощью электромеханического силового гироскопа сохраняет свое направление в пространстве. Для того чтобы обеспечить работу аппаратуры радиосвязи, на спутнике «Молния» установлены следящие системы, которые направляют антенны на заданный район и тем самым обеспечивают прием и передачу информации. При этом силовой электромеханический двигатель-гироскоп используется также для программного поворота системы путем изменения угловой скорости ротора двигателя, т. е. как двигатель-маховик, о чем подробнее будет сказано дальше.
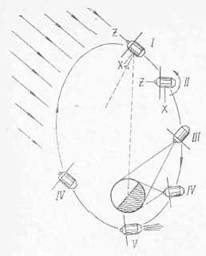
Рис. 7. Схема управления спутником «Молния-1» (стрелками слева вверху указано направление солнечных лучей):
I–V — положение спутника на орбите; X — поперечная ось аппарата; Z — продольная ось аппарата, ось вращения электромеханического силового гироскопа
Космические летательные аппараты «Венера», «Марс», «Луна», предназначенные для выхода на орбиту планет Солнечной системы и для спуска на их поверхности, по существу, обладают и свойствами ракеты-носителя. Таким образом, эти аппараты должны иметь всю типовую электромеханическую структуру (см. рис. 4) и все основные приборы и двигатели, свойственные ракете-носителю. Особое место в этих аппаратах занимают системы радиосвязи, обеспечивающие точное определение пространственных координат движения, управление объектом и поддержание непрерывной связи с аппаратом на всем этапе его движения и посадки или возвращения на Землю.
В бортовое оборудование космических аппаратов, кроме электромеханических систем ориентации, энергоснабжения, терморегулирования, входят другие электромеханические устройства. К этим устройствам относятся электромеханические лентопротяжные механизмы, применяемые в системах памяти ЭВМ, в запоминающих устройствах или фотометрических приборах. Очень важное значение имеют электромеханические синхронизированные двигатели или также используемые механизмы для сканирующих узлов телефотометрических аппаратов. Так как сканирующие приборы вращают узлы оптической системы в разные стороны поперек движения спутника по орбите, последовательно просматривая участок за участком в заданной полосе обзора, то от точности движения ротора электродвигателя или движения механизма зависят качество и разрешающая способность оптической аппаратуры.
Период сканирования, т. е. период колебательного механического движения зеркала поперек трассы, носит довольно сложный характер и требует прецизионных электронных систем регулирования движения ротора (соответствующего механизма) для обеспечения нужной закономерности при ходе зеркала вперед (когда снимается фотоизображение) и при ходе назад (когда фотоаппаратура не функционирует). В таких телефотометрических системах применяется бортовое и наземное единое время с помощью синхронной записи на магнитную ленту меток времени наряду с записью телефотоизображения. Это делается для того, чтобы на Земле получить соответствующее синхронное изображение поверхности с помощью воспроизведения синхронизирующим электрическим двигателем (преобразователем) движения пленки, на которой имеется зарегистрированное на борту спутника изображение. Таким образом, орбитальная бортовая электромеханическая система спутника должна неразрывно быть связана по времени с электромеханическими системами на Земле.
К наземному оборудованию предъявляются жесткие требования относительно синхронного и синфазного движения с движением орбитальных электродвигателей. Эта синхронность и синфазность обеспечивается системой радиопередатчиков и радиоприемников, которые, в свою очередь, могут вносить помехи и искажения в передаваемую информацию. Такая единая электромеханическая система регистрации изображения во времени (см. рис. 3) имеет исключительно важное значение для привязки изображения к географической местности и для опознания образов, характеризующих состояние посевов, ход уборки урожая, созревание сельскохозяйственных культур, а также для регистрации лесных пожаров, движения косяков рыб и т. д.