А. Г. Иосифьян,
академик АН Армянской ССР
ЭЛЕКТРОМЕХАНИКА В КОСМОСЕ
ВВЕДЕНИЕ
Электромеханика — наука о движении и взаимодействии вещественных инерциальных макроскопических и микроскопических тел, связанных с электрическими и магнитными полями. Движение различных транспортных средств: автомобилей, теплоэлектровозов, самолетов на современном этапе развития в очень большой степени определяется законами и принципами электромеханики.
Ракеты-носители, используемые для вывода полезного груза на орбиту вокруг Земли и имеющие бортовые системы электромеханики, автоматики, электроснабжения, по своим законам движения не существенно отличаются от мощных авиационных сверхскоростных самолетов. Поэтому электротехническое оборудование таких ракет-носителей, в том числе средства электромеханики (электрические машины, аппараты, приборы), по своим весогабаритным, энергетическим характеристикам и техническим требованиям очень близки к авиационному оборудованию (в том числе по продолжительности непрерывной работы), с той лишь разницей, что перегрузки при ускорениях и вибрационные характеристики авиационных электромеханических систем при применении в ракетах-носителях имеют более широкий диапазон.
В отличие от этих систем работоспособность бортового электротехнического оборудования и систем космических аппаратов, выводимых на орбиту, может исчисляться многими месяцами и годами. Поэтому с точки зрения общего технического оснащения электрифицированных механизмов соответствующими электромеханическими устройствами (особенно в длительно действующих обитаемых космических кораблях) они больше подходят и гармонируют с техническими эксплуатационными требованиями морских судов, в том числе глубинных аппаратов. В то же время, совпадая по эксплуатационным характеристикам и общей структуре технического оснащения с объектами морского судостроения, космические объекты требуют значительно более жестких ограничений на вес и габариты всех электротехнических, электромеханических, радиоэлектронных и других электрифицированных бортовых систем.
Следует отметить следующие особенности электромеханических устройств космических аппаратов. Во-первых, в условиях орбитального полета возникновение любого движения каждого бортового рабочего механизма (большого или малого) воздействует в целом на космический объект в соответствии с законами сохранения центра масс и момента количества движения. Таким образом, при использовании электрической энергии для обеспечения движения любой массы в заданном направлении (поступательном или вращательном) реакция этого движения на корпус космического аппарата должна быть каким-то образом скомпенсирована. Это создает особые условия работы электромеханических систем, устанавливаемых на космические аппараты. Причем для каждого частного случая специфические особенности реакции на корпус имеют свою особую форму.
Во-вторых, любое электромеханическое устройство, выполняя полезную работу, несет соответствующие (в зависимости от величины КПД) тепловые потери. При работе механизмов в условиях глубокого вакуума отвод тепла в космическое пространство не может происходить с помощью каких-либо охлаждающих агентов и поэтому осуществляется лишь за счет излучения лучистой энергии в пространство, что вызывает необходимость при конструировании космических аппаратов использовать соответствующие поверхности (площади) для отвода тепла.
И наконец, в-третьих, так как космический аппарат должен находиться в космосе и функционировать долгие годы, то при эксплуатации электромеханических систем такого объекта требуется, чтобы они имели очень длительный срок службы и безотказно и непрерывно работали в динамическом режиме в течение десятков тысяч часов.
ЭЛЕКТРОМЕХАНИКА И КОСМОНАВТИКА
Космонавтика как наука о полетах летательных аппаратов в космическом пространстве тесно связана с астрономией и физикой, особенно с такими разделами последней, как механика, теплотехника, электротехника. Одновременно космонавтика, являясь и отраслью техники, изучающей вопросы конструирования космических летательных аппаратов (как пилотируемых космических кораблей, так и автоматических), тесно связана с такими отраслями электротехники, как электромеханика, радиотехника, электроника, светотехника, техника высоких напряжений, электроэнергетика с электрохимическими, плазменными, химическими и другими типами источников электрической энергии. Все эти разделы электротехники так или иначе связаны с космонавтикой, но один из них — электромеханика — более глубоко и неразрывно, чем остальные.
Не случайно основоположник теоретической космонавтики К. Э. Циолковский еще в 1898 г. предложил для дирижабля применить электроавтопилот. Последний можно считать прообразом всех электромеханических систем управления в таких современных летательных аппаратах, как самолеты, вертолеты, ракеты-носители. Автопилот К. Э. Циолковского (рис. 1) состоял из электрического генератора постоянного тока и маятникового автомата, который в зависимости от наклонения продольной оси гондолы осуществлял управление полетом с помощью переключателя в двигателе постоянного тока, связанном через механическую передачу с рулем высоты. В этой системе была предусмотрена и механическая обратная связь: наблюдая через окно, пилот мог регистрировать положение руля.
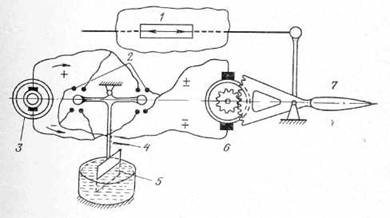
Рис. 1. Автопилот К. Э. Циолковского:
1 — окно; 2 — контакты; 3 — генератор; 4 — маятник; 5 — жидкостный демпфер; 6 — двигатель; 7 — руль высоты
По мере развития летательных аппаратов и установления принципиальных особенностей динамики их движения электромеханические системы усовершенствовались. Они стали включать в себя механические приборы, исполнительные механизмы с электродвигателями, электронную, автоматическую аппаратуру, обеспечивающие задачи точной ориентации в пространстве, точной навигации и соответствующей стабилизации. В то же время конструктивно развивались сами системы управления летательных аппаратов, в которых все большее отражение находили принципы организации движения, имеющиеся в органическом мире. Известно, что все виды пернатых используют при своем движении сигналы. от световых источников — звезд, Солнца, планет — магнитного и электрического полей Земли. С помощью этих сигналов пернатые в условиях земной атмосферы могут пролететь десятки тысяч километров, используя внутренние чувствительные элементы своих органов, связанных с ориентацией и стабилизацией тела в пространстве, с точной навигацией в любых метеорологических условиях (не только при движении в заданном направлении, но и для приземления в заданном участке земного шара). Между тем современная теория и техника использования электричества и магнетизма для точной ориентации и навигации еще далеки от того совершенства управления движением в пространстве, которое имеет место в органической природе. Ведь пернатые, используя лишь ничтожную энергию и обладая очень малой мощностью, осуществляют сверхдальние перелеты, совершая при этом сложные виды движения в пространстве.
Для управления движением современных автоматизированных летательных аппаратов как близ земной поверхности, так и в космическом пространстве требуются наличие чувствительных элементов для регистрации положения аппарата в пространстве, выработка электрических сигналов и параметров, соответствующих этому положению, разработка логики управления на основе полученных многочисленных сигналов и, наконец, передача электрических сигналов на силовые управляющие исполнительные органы. В качестве исполнительных органов могут быть использованы электрические двигатели, электромагнитные механизмы, электрогидравлические приводы.
Особенности электромеханических систем, обеспечивающих вывод космического летательного аппарата на орбиту вокруг Земли и его движение по орбите, весьма наглядно проявляются при анализе движения самолетов (на различных этапах их развития). На первых летательных аппаратах пилот самолета совершал взлет, ориентируясь по взлетной дорожке. По наблюдению за горизонтом он осуществлял подъем или спуск, наклоняя или поднимая носовую часть аппарата вокруг его поперечной оси («управлял углом тангажа»). Используя различные виды ориентиров, наклонял самолет вправо или влево вокруг продольной оси аппарата («управлял углом крена»). И наконец, наблюдая за магнитной стрелкой или прибором курса, поворачивал самолет вокруг вертикальной оси («управлял углом рыскания»).