Обобщенная структурная схема современного космического тренажера независимо от его типа и назначения (рис. 8) содержит пять основных блоков: рабочее место космонавта (РМК), систему имитации визуальной обстановки (СИВО), вычислительную систему (ВС), пульт контроля и управления (ПКУ) и устройства согласования (УС). Технический уровень реализации этой структуры определяет соотношения условий тренировки и условий космического полета, т. е. меру их подобия.
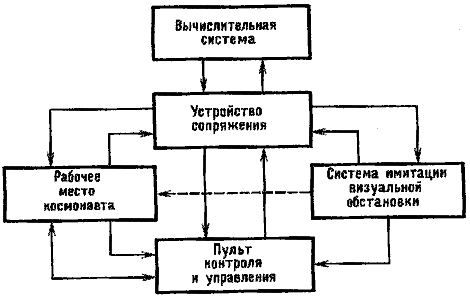
Рис. 8. Обобщённая структурная схема космического тренажёра
Современные тренажеры профессиональной подготовки космонавтов, представляющие уже третье поколение, реализуются на базе тренажерных систем или сетей [106].
Рассмотрим характеристики устройств космического тренажера, определяющих меру подобия воссоздаваемых на тренажере условий и в реальном полете, а также допустимые их отличия, обеспечивающие адекватность психических процессов, протекающих в том и другом случаях, благодаря адаптивным и мотивационным свойствам человека.
Рабочее место космонавта (РМК)
На специализированных и комплексных тренажерах транспортных кораблей и орбитальных станций установлены полноразмерные макеты или фрагменты ПКА, интерьер которых соответствует реальному ПКА. Все оборудование, система отображения информации (СОИ) и органы управления КА, с которыми работает или соприкасается экипаж, по всем характеристикам соответствует штатным. Та же часть оборудования, которая не включена в контур моделирования процессов управления ПКА (это относится прежде всего к специализированным тренажерам или стендам-тренажерам), выполнена в виде габаритно-весовых макетов.
Основным устройством контроля и управления ПКА, устанавливаемым на всех РМК, является пульт космонавта (рис. 9). Это многофункциональное оборудование, включающее командно-сигнальное устройство (КСУ), командно-сигнальные поля (КСП), индикатор контроля программ (ИКП), комбинированный электронный индикатор (КЭИ), БЧК, «Глобус» и другие приборы [43].
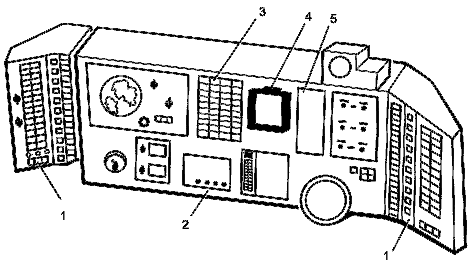
Рис. 9. Пульт космонавта: 1 — командно-сигнальное устройство (КСУ); 2 — приборная доска; 3 — командно-сигнальное поле; 4 — комбинированный электронный индикатор (КЭИ; 5 — индикатор контроля программ (ИКП)
Клавишами и сигнализаторами КСУ космонавт в нужные моменты времени управляет многочисленными системами ПКА или контролирует их параметры. КСП информирует экипаж о работе всех контролируемых систем корабля и обеспечивает управление ими. Информационное устройство КЭИ пульта космонавта также заменяет большое количество измерительных приборов, одновременно отображая на экране параметры функционирования систем ПКА. Так, при контроле системы жизнеобеспечения на КЭИ индицируется: температура, влажность, давление и концентрация СО2 в кабине ПКА. Кроме того, КЭИ подключен к наружным и внутренним телевизионным камерам, что позволяет контролировать с его помощью процесс стыковки.
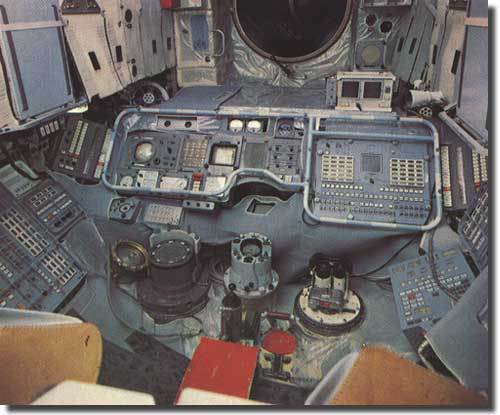
Пульт управления тренажёра станции «Салют»
Посредством ИКП экипаж информируется о текущей автоматической программе управления ПКА, ее содержании, длительности, текущем времени и исполнении команд. Каждая команда имеет свой индекс исполнения, который гаснет после ее выполнения, что позволяет экипажу контролировать правильность прохождения программы.

Внутренний интерьер тренажёра транспортного корабля «Союз Т»
Средства информации, которыми оснащено РМК на тренажере, облегчает создание у космонавтов мысленного представления полета ПКА, его положения в пространстве и работы различных систем и агрегатов. Иллюзия полета космонавтов в ходе тренировочного упражнения усиливается также созданием в макете ПКА реальной акустической обстановки имитацией шума двигателей коррекции и ориентации, шума от срабатывания пиромеханизмов, а также имитацией радиосвязи с Центром управления полетом и наземными пунктами.
Дальнейшее приближение условий тренажера к полетным при отработке операции спуска ПКА с орбиты осуществляется имитацией физического движения ПКА посредством установки его макета на подвижной платформе. В общем случае подвижная платформа должна иметь шесть степеней свободы—три линейных перемещения и угловые: по курсу, крену и тангажу. Акселерационные ощущения космонавта в этом случае синхронизуются с изменениями внешней визуальной обстановки в иллюминаторах и оптических приборах макета ПКА.
Погрешность синхронизации составляет менее 0,1 с, так как время запаздывания визуального восприятия движения по отношению к моменту стимуляции вестибулярного аппарата у человека составляет менее 0,1 с [112].
Воспроизведение реальных скоростей и ускорений ПКА на этапе спуска ПКА с орбиты на динамическом тренажере во всей полноте невозможно. Но в этом нет особой необходимости. Обусловлено это особенностями вестибулярного аппарата человека, который воспринимает прежде всего переходные процессы как линейных, так и угловых скоростей.
С целью создания адекватного восприятия на тренажере реальных ускорений ПКА и имитируемых, фронты переходных процессов воспроизводятся в масштабе 1:1 до моментов, соответствующих пределу чувствительности, т. е. насыщению вестибулярного аппарата человека. Космонавт, выполняющий динамические операции в подвижной кабине, получает от фронта ускорения все первоначальные ощущения движения, которые необходимы для адекватного восприятия реальных и имитируемых условий.
После воспроизведения реального фронта ускорения платформа тормозится, причем спад фронта торможения проходит ниже порога чувствительности вестибулярного аппарата космонавта [44], иначе у него могут возникнуть ложные ощущения. При этом, исходя из предельных величин перемещения подвижной платформы по линейным и угловым перемещениям, она переводится в нейтральное положение со скоростями и ускорениями, неощутимыми для вестибулярного аппарата космонавта.
Созданию на РМК обстановки психологически адекватной реальной в значительной мере способствует также «реакция» внешней визуальной обстановки в иллюминаторах и оптических средствах наблюдения макета ПКА на управляющие воздействия космонавта при выполнении тренировочного упражнения.
Система имитации визуальной обстановки (СИВО)
Из всей информации о состоянии ПКА, воспринимаемой сенсорным полем космонавта, более 80% поступает по зрительному каналу. Поэтому так важна на космическом тренажере роль средств имитации визуальной обстановки.
Посредством СИВО на тренажере воспроизводится обстановка орбитального полета ПКА, поиск, обнаружение и стыковка с орбитальной станцией, спуск с орбиты и приземление с воспроизведением изображений звезд. Земли, Луны, Солнца и других космических объектов, находящихся на орбите, во всех пространственных и угловых положениях ПКА.
Космонавт, воспринимая на тренажере визуальную информацию и информацию, поступающую по другим каналам сенсорного поля (слуховому, вестибулярному и др.), формирует воздействия на органы управления ПКА, отчего изменяется пространственное положение ПКА, а следовательно, и визуальная обстановка. По ее изменению космонавт контролирует движения ПКА, выполняет необходимые маневры с ориентированием на местности или в пространстве. По соответствующим ориентирам он определяет углы ориентации ПКА, приращения этих углов, угловые скорости, скорость и направление движения, а также текущие координаты (плоскостные или пространственные).
Характер изменения визуальной обстановки в иллюминаторах и оптических средствах наблюдения ПКА определяется особенностями объектов наблюдения и динамическими характеристиками ПКА.
В связи с тем, что движение ПКА в общем случае осуществляется в трехмерном пространстве, структура изображения визуальной обстановки находится в зависимости от шести координат (трех декартовых и трех эйлеровых), что требует правильной передачи перспективы воспроизводимых визуальных условий. Немаловажную роль играют при этом характеристики средств наблюдения.